Process Overview
Configure ROS
ROS environment preparation (take 16.04 ROS Kinetic as an example)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > / , → etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key␣ , → C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt-get update sudo apt-get install ros-kinetic-desktop-full sudo rosdep init rosdep update echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
Create your own workspace:
mkdir -p ~/catkin_ws/src //create folder cd ~/catkin_ws/src //Locate to src catkin_init_workspace //Initialize workspace
Configure orblam
You can use git directly. If the network speed is not good, you can directly compress the following packets:
Download address: https://webdiis.unizar.es/~raulmur/orbslam/:.
Compiling ORBSLAM2 ROS
After preparing the dependency library according to the steps on github, execute:
cd catkin_ws/src git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2 cd ORB_SLAM2 chmod +x build.sh ./build.sh #We need to use their ros library, so execute chmod +x build_ros.sh ./build_ros.sh
If the execution is successful, we can see the generated mono, mono AR, rgbd and stereo files under ROS/ORBSLAM2 of Examples
Common errors and Solutions
Run build-ros.sh Problem 1:
[rosbuild] rospack found package "ORB_SLAM2" at "", but the current directory is "/home/angelo/ORB_SLAM2/Examples/ROS/ORB_SLAM2". You should double-check your ROS_PACKAGE_PATH to ensure that packages are found in the correct precedence order.
Solution:
sudo ln -s ~/ORB_SLAM2/Examples/ROS/ORB_SLAM2 /opt/ros/<ros Version name>/share/ORB_SLAM2
Run build-ros.sh Problem 2: the core of this problem is the problem with the link boost library
/usr/bin/ld: CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv' /usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line collect2: error: ld returned 1 exit status CMakeFiles/RGBD.dir/build.make:217: recipe for target '../RGBD' failed make[2]: *** [../RGBD] Error 1 CMakeFiles/Makefile2:67: recipe for target 'CMakeFiles/RGBD.dir/all' failed make[1]: *** [CMakeFiles/RGBD.dir/all] Error 2 make[1]: *** Waiting for unfinished jobs.... /usr/bin/ld: CMakeFiles/Stereo.dir/src/ros_stereo.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv' /usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line collect2: error: ld returned 1 exit status CMakeFiles/Stereo.dir/build.make:217: recipe for target '../Stereo' failed make[2]: *** [../Stereo] Error 1 CMakeFiles/Makefile2:104: recipe for target 'CMakeFiles/Stereo.dir/all' failed make[1]: *** [CMakeFiles/Stereo.dir/all] Error 2
Solution: open examples / ROS / orb_ Cmakelists of slam2, in
set(LIBS ${OpenCV_LIBS} ${EIGEN3_LIBS} ${Pangolin_LIBRARIES} ${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so ${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so ${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so #There are many solutions to increase the bank, which is the easiest -lboost_system )
Install and configure camera index camera SDK
Github address: https://github.com/INDEMIND/IMSEE-SDK.
Support platform
The SDK is built based on cmake and spans Ubuntu and w in10 platforms. Among them, Ubuntu supports x64/tx2/firefly rk series and other different architectures. At present, the platforms that have passed the test are:
Ubuntu 16.04 on x64
Ubuntu 16.04 on TX2
Ubuntu 16.04 on RK3328
Compiling ROS samples
The makefile file has been written, so it's very simple
cd <sdk> make ros
function
cd <sdk> sudo su # Enter permission mode source ros/devel/setup.bash roslaunch imsee_ros_wrapper start.launch # If you want to preview rviz, run roslaunch imsee_ ros_ wrapper display.launch
View publishing node
rostopic list
We need the following Topic names:
/imsee/camera_info#Camera information /imsee/depth#Depth map /imsee/image/left#Left camera image /imsee/image/right#Right camera image /imsee/imu#imu information
In this way, we can directly change the topic of ORBSLAM2ROS to read the camera content
ORBSLAM2ROS reading camera content
cd ~/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src
ros_mono.cc #Single directory ros source file ros_rgbd.cc #Deep camera ros source file ros_stereo.cc #Binocular ros source file
Take the binocular camera as an example, find the part of ros subscription topic, and change the content to the following:
ros::NodeHandle nh; //The part of the topic is changed to the topic name subscribed by the ideandsdk topic. Here is the left camera and the right camera message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/imsee/image/left", 1); message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "/imsee/image/right", 1); typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::Image> sync_pol; message_filters::Synchronizer<sync_pol> sync(sync_pol(10), left_sub,right_sub); sync.registerCallback(boost::bind(&ImageGrabber::GrabStereo,&igb,_1,_2)); ros::spin();
Start camera and ORBSLAM2_ROS
Start camera
cd <sdk> sudo su # Enter permission mode source ros/devel/setup.bash roslaunch imsee_ros_wrapper start.launch # If you want to preview rviz, run roslaunch imsee_ ros_ wrapper display.launch
Start ORBSLAM2_ROS
cd ~/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2 #ORBvoc.txt For dictionary content, the Asus.yaml It is the internal parameter format of the camera, which can be changed according to its own calibration results. false is whether to correct the flag bit rosrun ORB_SLAM2 Stereo ../../../Vocabulary/ORBvoc.txt Asus.yaml false
If this error is reported, reopen a terminal and open roscore:
[ERROR] [1591685038.629400679]: [registerPublisher] Failed to contact master at [localhost:11311]. Retrying... #Reopen a terminal and enter: roscore
Usage of three nodes
Note that the last parameter of the Stereo node means whether to correct or not, which is generally set to false. For more details, you can view the document as required:
#Monocular Usage: rosrun ORB_SLAM2 Mono path_to_vocabulary path_to_settings #Depth camera Usage: rosrun ORB_SLAM2 RGBD path_to_vocabulary path_to_settings #Binocular camera Usage: rosrun ORB_SLAM2 Stereo path_to_vocabulary path_to_settings do_rectify
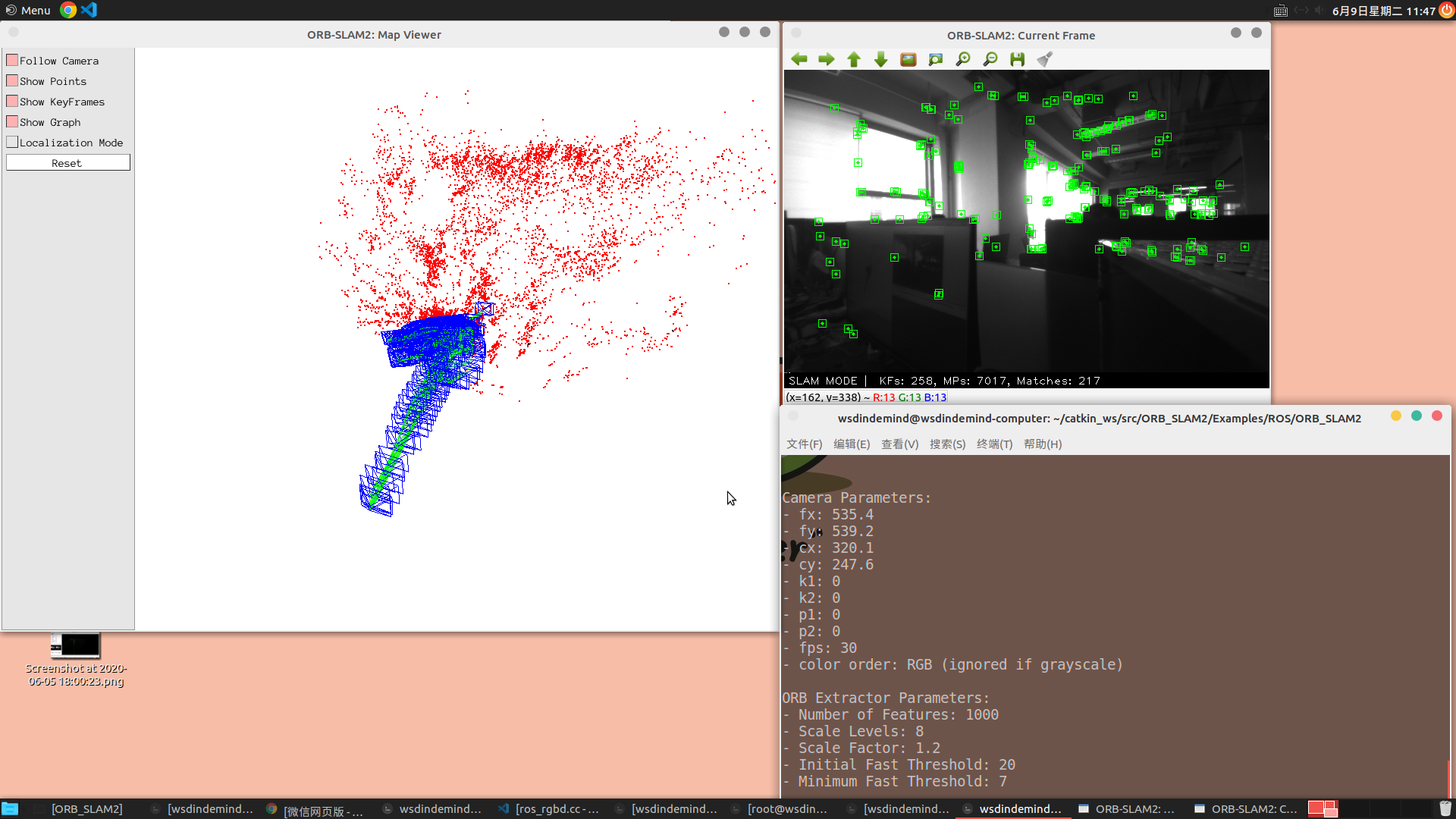
Operation results
So far, it has been successfully run: