1) Experimental platform: new starting point V2 development board of punctual atom
2) Platform purchase address: https://detail.tmall.com/item.htm?id=609758951113
2) Full set of experimental source code + manual + video download address: http://www.openedv.com/thread-300792-1-1.html
3) Students interested in punctual atomic FPGA can add group discussion: 994244016
4) pay attention to the official account of the dot atom and get updated information.
Chapter 26 infrared remote control experiment
Infrared remote control is a wireless and non-contact control technology. It has the remarkable characteristics of strong anti-interference ability, reliable information transmission, low power consumption and easy implementation. It is widely used by many electronic devices, especially household appliances, and is more and more applied to computer systems. In this chapter, we will use the new starting point FPGA development board to receive the infrared signal sent by the infrared remote controller and display the data on the nixie tube. If a duplicate code is detected, it will be indicated by LED flashing.
This chapter is divided into the following chapters:
2525.1 introduction
25.2 experimental tasks
25.3 hardware design
25.4 program design
25.5 download verification
26.1 introduction
Infrared remote control is a wireless and non-contact control technology. Because it does not have the ability to control the controlled object through obstacles like radio remote control, infrared remote controllers of similar products can have the same remote control frequency or code without controlling or interfering with neighbors' household appliances, This provides great convenience for mass production and popularization of infrared remote control in household appliances. What the infrared remote controller emits is actually a kind of infrared light (infrared), whose wavelength range is between 1mm and 760nm, while the wavelength range of visible light of human eyes is generally between 400nm and 760nm, so we can't see the infrared light emitted by the infrared remote controller, so it has little impact on the environment and won't affect the adjacent radio equipment.
At present, the coding of infrared remote controller is widely used: NEC protocol and Philips RC-5 protocol. The remote controller matched with the new starting point FPGA development board uses NEC protocol, and its logic level coding format is shown in figure 26.1.1.
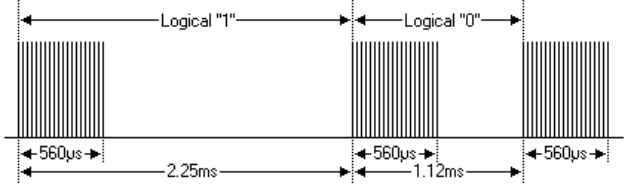
Figure 26.1.1 logic level coding format of NEC protocol
NEC protocol is encoded in the form of PPM (Pulse Position Modulation). The pulse length of each Bit of data is 560us, modulated by 38KHz carrier burst, and the recommended carrier duty cycle is 1 / 3 to 1 / 4. It can be seen from the above figure that where there are carrier pulses, the width is 560us, and the interval time of carrier pulses is different. The carrier pulse + carrier pulse interval of logic "1" is 2.25ms; The carrier pulse + carrier pulse interval of logic "0" is about half of logic "1", that is, 1.12ms.

Figure 26.1.2 data transmission format of NEC protocol
Figure 26.1.2 shows the data transmission format of NEC protocol. It can be seen from the figure that the low order is the first when transmitting data. The Address code (Address) in the figure is 0x59 and the control code (Command) is 0x16. The transmission of a message starts with 9ms AGC (automatic gain control) carrier pulse, which is used to set the gain in the early IR receiver; Followed by an idle signal of 4.5ms; This is followed by the Address code and the control code. The Address code and control code are transmitted twice respectively. The Address code and control code transmitted in the second time are inverse codes, which are used to verify the Address code and control code. Of course, the inverse code of Address code and control code can also be directly ignored. Each time the information is transmitted according to the format of synchronization code (9ms carrier pulse + 4.5ms idle signal), Address code, Address inverse code, control code and control inverse code. Therefore, the time of single information transmission is fixed.
When the key on the infrared remote control is pressed all the time, the infrared remote control will only send a complete message once, and then send a repeat code (also known as continuous code) every 110ms. The data format of repetition code is relatively simple. It also starts with 9ms AGC (automatic gain control) carrier pulse, followed by 2.25ms idle signal, followed by 560us carrier pulse. The data format of repetition code is shown in Fig. 26.1.3 and Fig. 26.1.4.
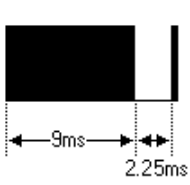
Figure 26.1.3 data format of repetition code

Figure 26.1.4 always sending duplicate codes
The above part is an introduction to the NEC protocol, that is, the protocol specification followed by the infrared remote controller when sending data. Next, we understand the infrared receiver on the lower development board. Its model is HS0038B. The physical diagram and structural block diagram are shown in figure 26.1.5 and figure 26.1.6.
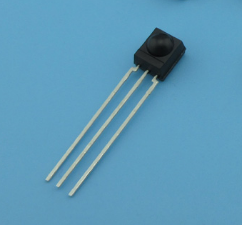
Figure 26.1.5 physical drawing of HS0038B
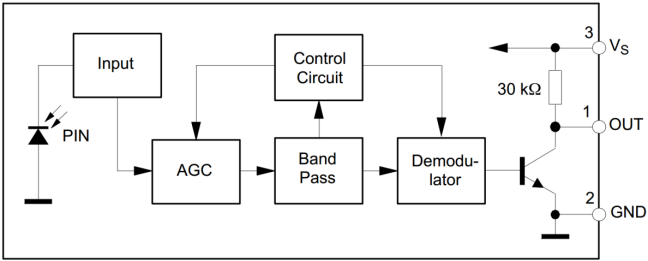
Figure 26.1.6 structural block diagram of HS0038B
The infrared receiver is usually integrated into one component by the manufacturer to become an integrated infrared receiver. Infrared monitoring diode, automatic gain amplifier (AGC), Band Pass filter (Band Pass), Demodulator and other circuits are integrated inside. The information sent by the infrared remote controller is secondary modulated by the carrier frequency of 38KHz to improve the transmission efficiency and reduce the power supply power, and then the infrared is generated by the infrared transmitting diode and transmitted into space. The infrared receiver converts the optical signal into electrical signal through the infrared monitoring diode. After circuit modulation, it finally outputs the TTL level signal that can be collected by FPGA. It should be noted here that the triode circuit inside the infrared receiving head has the function of signal reverse, that is, changing 1 to 0 and 0 to 1, then the whole protocol above will receive the level in reverse. If 9ms is originally high level, it will become low level, and so on. As shown in figure 26.1.7, the waveform corresponding to reception and decoding is the infrared signal finally received by FPGA.
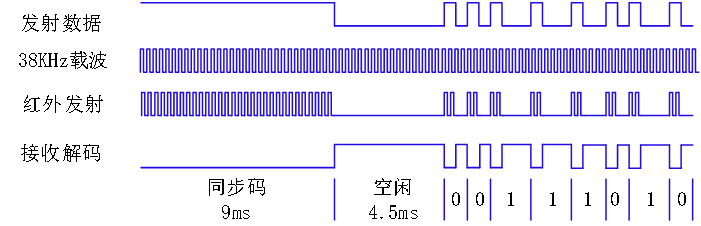
Figure 26.1.7 infrared receiving and decoding diagram
The following figure shows the complete waveform received by infrared decoding.

Figure 26.1.8 complete waveform received by infrared decoding
As can be seen from figure 26.1.8, the address code is 0 and the control code is 0x15. After a period of time, we can also receive several pulses, which is the repetition code (consecutive code) specified in NEC protocol. If the key is still not released after a frame of data is sent, the repetition code will be transmitted. The length / times of pressing the key can be marked by counting the repetition code.
The following figure is the key code value corresponding to the key of infrared remote control.

Figure 26.1.9 key code values corresponding to infrared remote control
It should be noted that the key code values on the right in the above figure are displayed in decimal numbers.
26.2 experimental tasks
The experimental task of this section is to use the new starting point FPGA development board to receive the infrared signal sent by the infrared remote controller and display the data on the nixie tube; If a duplicate code is detected, it is indicated by a flashing LED.
26.3 hardware design
The circuit schematic diagram of HS0038 is shown in figure 26.3.1, which is remote_ The in signal is the level output of the infrared receiving head.
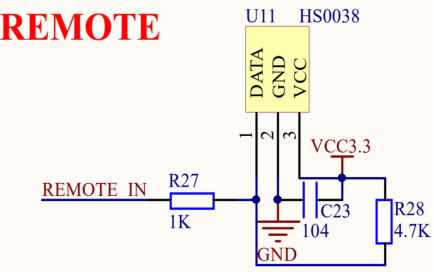
Figure 26.3.1 circuit schematic diagram of HS0038B
The pin allocation of this experiment is shown in the table below
Table 26.3.1 pin distribution of infrared remote control nixie tube display experiment
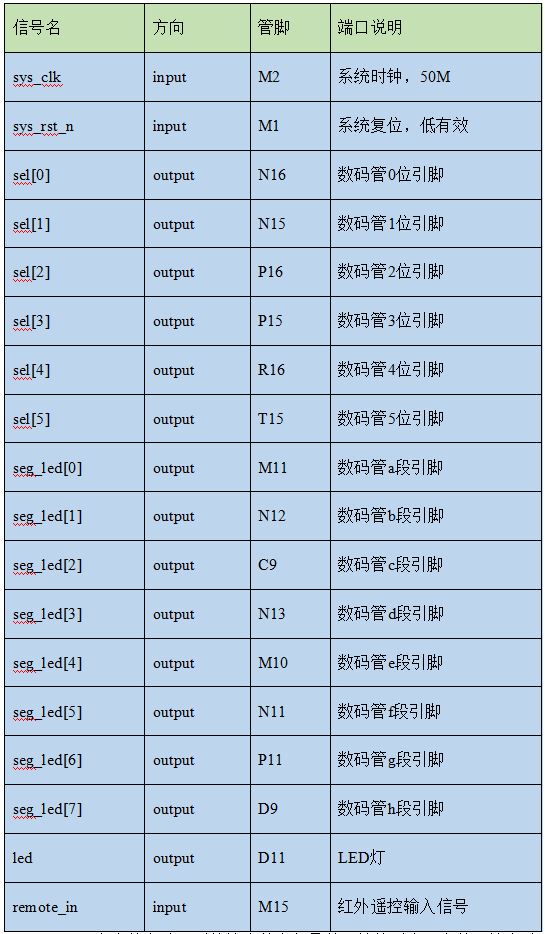
remote_in input M15 infrared remote control input signal
Because the pins used in this experiment are basically the pins of the nixie tube, which have been given in the nixie tube experiment chapter, the TCL constraint file is no longer provided here.
26.4 program design
According to the experimental task, the control process can be roughly planned. The infrared driving module analyzes the infrared data, outputs the control code to the nixie tube driving module, and the effective signal of the repeated code is output to the LED control module. The nixie tube drive module sends the corresponding bit selection and segment selection signals to the nixie tube to display the corresponding numbers on the nixie tube. The LED control module controls the lighting of the LED lamp according to the repeated code signal. The system block diagram is shown below.
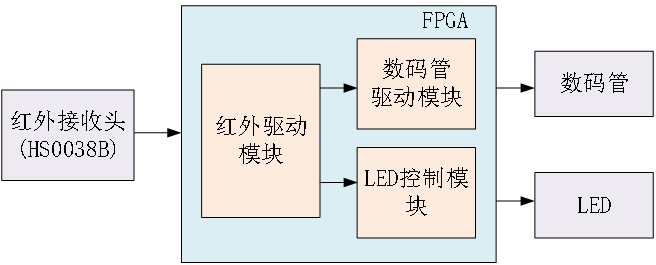
Figure 26.4.1 block diagram of infrared remote control experiment system
The schematic diagram of the top-level module is shown below
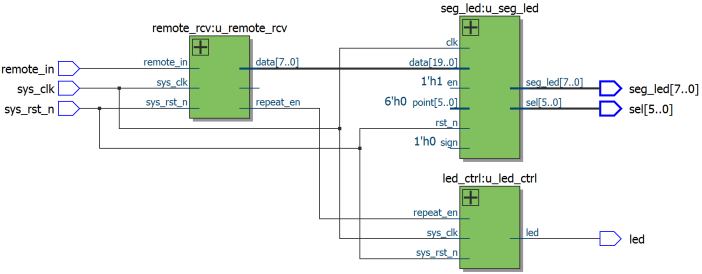
Figure 26.4.2 schematic diagram of top-level module
The FPGA top-level (top_remote_rcv) instantiates the following two modules: infrared drive module (remote_rcv) and digital tube dynamic display module (seg_led), so as to realize the signal interaction between each module.
The top-level module code is as follows:
1 module top_remote_rcv( 2 input sys_clk , //System clock 3 input sys_rst_n, //System reset signal, active at low level 4 input remote_in, //Infrared receiving signal 5 output [5:0] sel , //Nixie tube position selection signal 6 output [7:0] seg_led , //Nixie tube segment selection signal 7 output led //led lamp 8 ); 9 10 //wire define 11 wire [7:0] data ; 12 wire repeat_en ; 13 14 //***************************************************** 15 //** main code 16 //***************************************************** 17 18 //Nixie tube display module 19 seg_led u_seg_led( 20 .clk (sys_clk), 21 .rst_n (sys_rst_n), 22 .sel (sel), 23 .seg_led (seg_led), 24 .data (data), //Infrared data 25 .point (6'd0), //No decimal point 26 .en (1'b1), //Enable nixie tube 27 .sign (1'b0) //Unsigned display 28 ); 29 30 //HS0038B drive module 31 remote_rcv u_remote_rcv( 32 .sys_clk (sys_clk), 33 .sys_rst_n (sys_rst_n), 34 .remote_in (remote_in), 35 .repeat_en (repeat_en), 36 .data_en (), 37 .data (data) 38 ); 39 40 led_ctrl u_led_ctrl( 41 .sys_clk (sys_clk), 42 .sys_rst_n (sys_rst_n), 43 .repeat_en (repeat_en), 44 .led (led) 45 ); 46 47 endmodule
The top-level module completes the instantiation of other modules. The control code (data) output by the infrared drive module is connected to the nixie tube display module, and the output repeats_ En (repetition code valid signal) is connected to the LED control module.
From the infrared transmission timing introduced in the introduction part of this chapter, it can be found that the infrared transmission timing is very suitable for writing using state machine. The status jump diagram of infrared drive module is shown in the figure below.
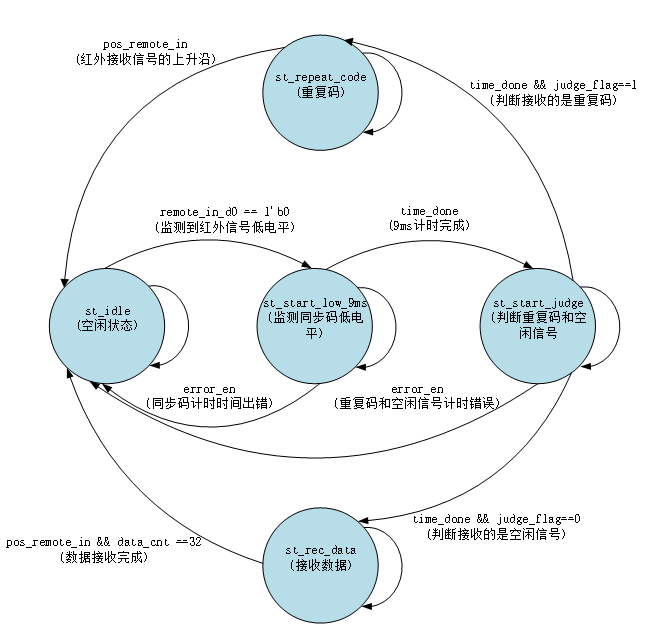
Figure 26.4.3 status jump diagram of infrared drive module
The infrared drive module uses a three-stage state machine to analyze the infrared remote control signal. From the above figure, you can intuitively see the functions realized in each state and the conditions for jumping to the next state. Since a complete infrared information and repetition code start with the synchronization code (low level of 9ms), the time of idle signal high level is different. The time of idle signal high level of a complete infrared information is 4.5ms, while the time of idle signal high level of repetition code is 2.25ms. So we're in st_start_judge the time of idle signal high level in the state. If the time is 4.5ms, jump to st_rec_data status; If the time is 2.25ms, jump to st_repeat status.
Some codes of infrared drive module are as follows:
1 module remote_rcv(
2 input sys_clk , //System clock
3 input sys_rst_n , //System reset signal, active at low level
4
5 input remote_in , //Infrared receiving signal
6 output reg repeat_en , //Repetition code effective signal
7 output reg data_en , //Data valid signal
8 output reg [7:0] data //Infrared control code
9 );
10
11 //parameter define
12 parameter st_idle = 5'b0_0001; //Idle state
13 parameter st_start_low_9ms = 5'b0_0010; //Monitoring synchronization code low level
14 parameter st_start_judge = 5'b0_0100; //Judge the high level of repetition code and synchronization code (idle signal)
15 parameter st_rec_data = 5'b0_1000; //receive data
16 parameter st_repeat_code = 5'b1_0000; //Repeat code
17
18 //reg define
19 reg [4:0] cur_state ;
20 reg [4:0] next_state ;
21
22 reg [11:0] div_cnt ; //Frequency division counter
23 reg div_clk ; //Frequency division clock
24 reg remote_in_d0 ; //Delay shooting of the input infrared signal
25 reg remote_in_d1 ;
26 reg [7:0] time_cnt ; //Count each state of the infrared
27
28 reg time_cnt_clr ; //Counter reset signal
29 reg time_done ; //Timing completion signal
30 reg error_en ; //Error signal
31 reg judge_flag ; //Detected flag signal 0: synchronization code high level (idle signal) 1: repetition code
32 reg [15:0] data_temp ; //Temporarily store the received control code and control inverse code
33 reg [5:0] data_cnt ; //Count the received data
34
35 //wire define
36 wire pos_remote_in ; //The rising edge of the input infrared signal
37 wire neg_remote_in ; //Falling edge of input infrared signal
38
39 //*****************************************************
40 //** main code
41 //*****************************************************
42
43 assign pos_remote_in = (~remote_in_d1) & remote_in_d0;
44 assign neg_remote_in = remote_in_d1 & (~remote_in_d0);
45
46 //Clock frequency division, 50Mhz/(2*(3124+1))=8khz,T=0.125ms
47 always @(posedge sys_clk or negedge sys_rst_n ) begin
48 if (!sys_rst_n) begin
49 div_cnt <= 12'd0;
50 div_clk <= 1'b0;
51 end
52 else if(div_cnt == 12'd3124) begin
53 div_cnt <= 12'd0;
54 div_clk <= ~div_clk;
55 end
56 else
57 div_cnt = div_cnt + 12'b1;
58 end
59
60 //Count each state of the infrared
61 always @(posedge div_clk or negedge sys_rst_n) begin
62 if(!sys_rst_n)
63 time_cnt <= 8'b0;
64 else if(time_cnt_clr)
65 time_cnt <= 8'b0;
66 else
67 time_cnt <= time_cnt + 8'b1;
68 end
69
70 //Remote for input_ In signal delay beat
71 always @(posedge div_clk or negedge sys_rst_n) begin
72 if(!sys_rst_n) begin
73 remote_in_d0 <= 1'b0;
74 remote_in_d1 <= 1'b0;
75 end
76 else begin
77 remote_in_d0 <= remote_in;
78 remote_in_d1 <= remote_in_d0;
79 end
80 end
81
82 //State machine
83 always @ (posedge div_clk or negedge sys_rst_n) begin
84 if(!sys_rst_n)
85 cur_state <= st_idle;
86 else
87 cur_state <= next_state ;
88 end
89
90 always @(*) begin
91 next_state = st_idle;
92 case(cur_state)
93 st_idle : begin //Idle state
94 if(remote_in_d0 == 1'b0)
95 next_state = st_start_low_9ms;
96 else
97 next_state = st_idle;
98 end
99 st_start_low_9ms : begin //Monitoring synchronization code low level
100 if(time_done)
101 next_state = st_start_judge;
102 else if(error_en)
103 next_state = st_idle;
104 else
105 next_state = st_start_low_9ms;
106 end
107 st_start_judge : begin //Judge the high level of repetition code and synchronization code (idle signal)
108 if(time_done) begin
109 if(judge_flag == 1'b0)
110 next_state = st_rec_data;
111 else
112 next_state = st_repeat_code;
113 end
114 else if(error_en)
115 next_state = st_idle;
116 else
117 next_state = st_start_judge;
118 end
119 st_rec_data : begin //receive data
120 if(pos_remote_in && data_cnt == 6'd32)
121 next_state = st_idle;
122 else
123 next_state = st_rec_data;
124 end
125 st_repeat_code : begin //Repeat code
126 if(pos_remote_in)
127 next_state = st_idle;
128 else
129 next_state = st_repeat_code;
130 end
131 default : next_state = st_idle;
132 endcase
133 end
134
135 always @(posedge div_clk or negedge sys_rst_n ) begin
136 if (!sys_rst_n) begin
137 time_cnt_clr <= 1'b0;
138 time_done <= 1'b0;
139 error_en <= 1'b0;
140 judge_flag <= 1'b0;
141 data_en <= 1'b0;
142 data <= 8'd0;
143 repeat_en <= 1'b0;
144 data_cnt <= 6'd0;
145 data_temp <= 32'd0;
146 end
147 else begin
148 time_cnt_clr <= 1'b0;
149 time_done <= 1'b0;
150 error_en <= 1'b0;
151 repeat_en <= 1'b0;
152 data_en <= 1'b0;
153 case(cur_state)
154 st_idle : begin
155 time_cnt_clr <= 1'b1;
156 if(remote_in_d0 == 1'b0)
157 time_cnt_clr <= 1'b0;
158 end
159 st_start_low_9ms : begin //9ms/0.125ms = 72
160 if(pos_remote_in) begin
161 time_cnt_clr <= 1'b1;
162 if(time_cnt >= 69 && time_cnt <= 75)
163 time_done <= 1'b1;
164 else
165 error_en <= 1'b1;
166 end
167 end
168 st_start_judge : begin
169 if(neg_remote_in) begin
170 time_cnt_clr <= 1'b1;
171 //Repeat code high level 2.25ms 2.25/0.125 = 18
172 if(time_cnt >= 15 && time_cnt <= 20) begin
173 time_done <= 1'b1;
174 judge_flag <= 1'b1;
175 end
176 //Synchronization code high level 4.5ms 4.5/0.125 = 36
177 else if(time_cnt >= 33 && time_cnt <= 38) begin
178 time_done <= 1'b1;
179 judge_flag <= 1'b0;
180 end
181 else
182 error_en <= 1'b1;
183 end
184 end
185 st_rec_data : begin
186 if(pos_remote_in) begin
187 time_cnt_clr <= 1'b1;
188 if(data_cnt == 6'd32) begin
189 data_en <= 1'b1;
190 data_cnt <= 6'd0;
191 data_temp <= 16'd0;
192 if(data_temp[7:0] == ~data_temp[15:8]) //Check control code and control inverse code
193 data <= data_temp[7:0];
194 end
195 end
196 else if(neg_remote_in) begin
197 time_cnt_clr <= 1'b1;
198 data_cnt <= data_cnt + 1'b1;
199 //Analytic control code and inverse control code
200 if(data_cnt >= 6'd16 && data_cnt <= 6'd31) begin
201 if(time_cnt >= 2 && time_cnt <= 6) begin //0.56/0.125 = 4.48
202 data_temp <= {1'b0,data_temp[15:1]}; //Logical '0'
203 end
204 else if(time_cnt >= 10 && time_cnt <= 15) //1.69/0.125 = 13.52
205 data_temp <= {1'b1,data_temp[15:1]}; //Logical "1"
206 end
207 end
208 end
209 st_repeat_code : begin
210 if(pos_remote_in) begin
211 time_cnt_clr <= 1'b1;
212 repeat_en <= 1'b1;
213 end
214 end
215 default : ;
216 endcase
217 end
218 end
219
220 endmodule
In the always statement block at the beginning of line 47 of the code, we divide the input 50MHz clock to obtain a clock with a period of 0.125ms (8kHz), that is, the infrared signal is sampled with an 8kHz clock. The reason why the clock is divided here is that the infrared signal reception process takes a long time. If a 50MHz clock sampling is used, the internally defined counter bit width will be relatively large. Therefore, we divide the input clock. Of course, it is also possible to divide the frequency to obtain clocks of other frequencies.
The code uses a three-stage state machine to analyze the infrared signal. The state machine defaults to st_idle state, and time_cnt_ The value of CLR is 1, that is, time_cnt counter stops timing; When remote is detected_ in_ After d0 is low level, time_cnt_ The value of CLR is 0, time_ The CNT counter starts timing, and the state machine jumps to st_start_low_9ms state, here we mainly introduce how the program counts the 9ms low-level synchronization code. In line 160 of the code, when POS is detected_ remote_ In (rising edge of infrared signal) is the high level, indicating that the infrared signal is pulled high at this time, that is, the low level of synchronization code ends, and time is judged at this time_ Whether the value of CNT is close to 9ms. If it is close to 9ms, it starts to jump to st_start_judge state, otherwise jump to idle state. The detection methods for idle signals, duplicate codes and data are similar later in the program, which will not be repeated here.
Figure 26.4.4 shows the waveform captured by SignalTap, from which you can clearly see the waveform diagram of each state jump of the infrared drive module. It can be observed that the bus is at high level in the idle state. After pressing the key of the remote controller, it will send 9ms low-level synchronization code and 4.5ms high-level idle signal, and then send 00000000 address code and 11111111 address inverse code; Next, the control code of 10100010 and the control inverse code of 01011101 are sent. It should be noted that the infrared remote control first sends the low order of the data, so the control code is 8'b001000101 (8'd69), which is consistent with the data in the figure. At the end of the waveform, the duplicate code sent by the infrared remote controller is received. When the program detects the duplicate code, repeat_en sends a pulse signal.
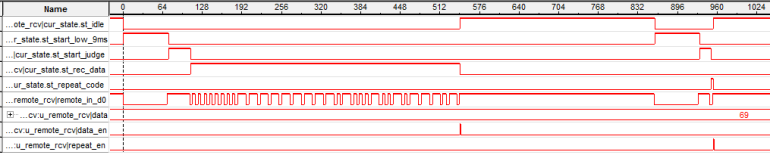
Figure 26.4.4 waveform diagram of signaltap capture
LED control module codes are as follows:
1 module led_ctrl( 2 input sys_clk , //System clock 3 input sys_rst_n , //System reset signal, active at low level 4 5 input repeat_en , //Repetition code trigger signal 6 output reg led //LED light 7 ); 8 9 //reg define 10 reg repeat_en_d0 ; //repeat_en signal beat acquisition edge 11 reg repeat_en_d1 ; 12 reg [22:0] led_cnt ; //LED light counter, used to control LED light on and off 13 14 //wire define 15 wire pos_repeat_en; 16 17 //***************************************************** 18 //** main code 19 //***************************************************** 20 21 assign pos_repeat_en = ~repeat_en_d1 & repeat_en_d0; 22 23 repeat_en Signal beat edge 24 always @(posedge sys_clk or negedge sys_rst_n) begin 25 if(!sys_rst_n) begin 26 repeat_en_d0 <= 1'b0; 27 repeat_en_d1 <= 1'b0; 28 end 29 else begin 30 repeat_en_d0 <= repeat_en; 31 repeat_en_d1 <= repeat_en_d0; 32 end 33 end 34 35 always @(posedge sys_clk or negedge sys_rst_n) begin 36 if(!sys_rst_n) begin 37 led_cnt <= 23'd0; 38 led <= 1'b0; 39 end 40 else begin 41 if(pos_repeat_en) begin 42 led_cnt <= 23'd5_000_000; //Single repetition code: on for 80ms and off for 20ms 43 led <= 1'b1; //led on time: 4_000_000*20ns=80ms 44 end 45 else if(led_cnt != 23'd0) begin 46 led_cnt <= led_cnt - 23'd1; 47 if(led_cnt < 23'd1_000_000) //led off time: 1_000_000*20ns=20ms 48 led <= 1'b0; 49 end 50 end 51 end 52 53 endmodule
The code of LED control module is relatively simple. First, check repeat_ The rising edge of the en signal (as shown by always at the beginning of line 24 of the code), POS_ repeat_ After en is pulled high, the counter is assigned to 5_ 000_ 000, and then the counter starts to decrease by 1 in each cycle until it counts to 0; At counter at 1_ 000_ 000~5_ 000_ 000, turn on the LED and turn off the LED in other cases, indicating whether the infrared remote control module detects a duplicate code.
26.5 download verification
First connect one end of the downloader to the computer and the other end to the corresponding port on the development board, then connect the power cord and turn on the power switch, and then download the sof file to the board.
After downloading, press any key on the remote control to observe the data displayed on the nixie tube; If you press and hold the key, you can observe that the LED is flashing continuously. It should be noted that before using the remote control, pull out the plastic insulating sheet at the rear of the remote control, otherwise the remote control will not work normally. The physical drawing of the remote controller is as follows:

Figure 26.5.1 physical diagram of remote controller
Press the key of the remote control, and the nixie tube on the development board will display the corresponding key code value, as shown in the figure below:

Figure 26.5.2 display key code value