1. The root file system is stored in flash, and it will take a long time to start the device. This is because reading rootfs data from flash is time-consuming, and reading *. Stored in rootfs at the same time so,*. ko and other documents are also time-consuming. This is determined by the read and write properties of flash itself. For some devices that need to start quickly, the read-write rate of flash cannot be met, so you can consider mounting rootfs in memory, that is, ramdisk.
2. Using ramdisk requires kernel support, and config needs to be opened_ BLK_ DEV_ Initrd macro
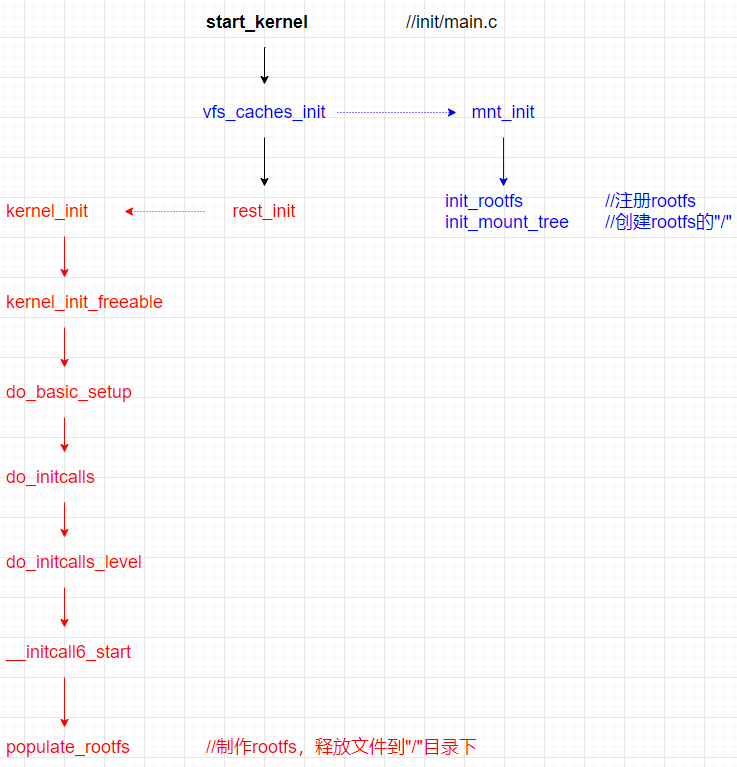
3. The initramfs initialization flow chart is shown in the following figure, which is mainly divided into two parts.
3.1. Mount rootfs ("/"), vfs_caches_init branch
3.2. Making rootfs and rest_init branch
4. Establish rootfs
struct vfsmount *
vfs_kern_mount(struct file_system_type *type, int flags, const char *name, void *data)
{
......
root = mount_fs(type, flags, name, data);
......
}
EXPORT_SYMBOL_GPL(vfs_kern_mount);According to VFS_ kern_ The name="rootfs" passed in by the mount function will eventually execute rootfs_mount completes the establishment of the root file system.
static struct file_system_type rootfs_fs_type = {
.name = "rootfs",
.mount = rootfs_mount,
.kill_sb = kill_litter_super,
};5. Make root file system
5.1. How to start from__ initcall6_start to populate_rootfs
device_initcall(populate_rootfs);
populate_rootfs function through device_initcall macro, loaded into a specific section (. initcall6.init)
#define device_initcall(fn) __define_initcall(fn, 6) #define __define_initcall(fn, id) ___define_initcall(fn, id, .initcall##id) #define ___define_initcall(fn, id, __sec) \ static initcall_t __initcall_##fn##id __used \ __attribute__((__section__(#__sec ".init"))) = fn;
device_initcall function__ initcall_populate_rootfs6 is stored in initcall6. In the section of init
Via / / include / ASM generic / vmlinux lds. H link script file, found

When executed__ initcall6_ When the start function is executed, it is stored in the initcall6.init is the data of this section, i.e__ initcall_populate_rootfs6 function
5.2. Making rootfs
static int __init populate_rootfs(void)
{
char *err = unpack_to_rootfs(__initramfs_start, __initramfs_size);
......
if (initrd_start) {
......
printk(KERN_INFO "Unpacking initramfs...\n");
err = unpack_to_rootfs((char *)initrd_start,
initrd_end - initrd_start);
if (err)
printk(KERN_EMERG "Initramfs unpacking failed: %s\n", err);
free_initrd();
/*
* Try loading default modules from initramfs. This gives
* us a chance to load before device_initcalls.
*/
load_default_modules();
}
return 0;
}5.2.1 first unpcak_ to_ [_initramfs_start, _initramfs_start + _initramfs_size] data of rootfs
Via / / include / ASM generic / vmlinux lds. H link script file, found

It defines init.ramfs and init.ramfs.info two section s
Via / / usr/initramfs_data.S file discovery__ initramfs_size is determined by initramfs_data.o confirm
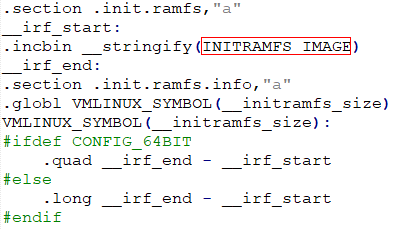
Including INITRAMFS_IMAGE is defined in / / usr/Makefile file

initramfs is generally not used after loading
5.2.2 post unpack_ to_ [initrd_start, initrd_end] data of rootfs
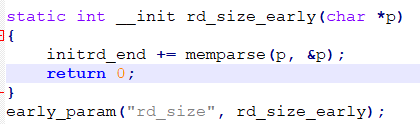
Where initrd_end and initrd_start is passed in through cmdline, and the data has been decompressed from the rootfs partition of flash and moved to initrd in the uboot phase_ Start address.
5.2.2.1 production of rootfs in flash image
rootfs generates *. Through cpio command cpio files are compressed according to the compression method (in the build\images.mk script)
#lzo compression mode, rootfs Bin is rootfs_initramfs.cpio lzo compressed file lzop -x rootfs.bin #Convert the cpio file into directory format, and ls view the specific directory content cpio -idmv < rootfs_initramfs.cpio
5.2.2.2 production of rootfs in memory
static char * __init unpack_to_rootfs(char *buf, unsigned len)
{
......
while (!message && len) {
loff_t saved_offset = this_header;
if (*buf == '0' && !(this_header & 3)) {
state = Start;
written = write_buffer(buf, len);
......
}
......
this_header = 0;
decompress = decompress_method(buf, len, &compress_name);
if (decompress) {
res = decompress(buf, len, NULL, flush_buffer, NULL,
&my_inptr, error);
if (res)
error("decompressor failed");
}
......
}
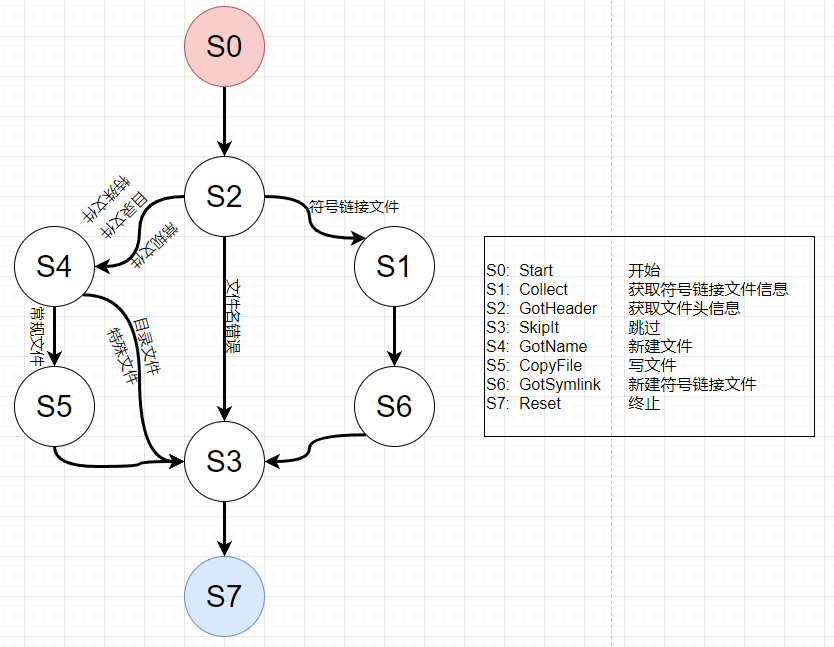
}The data in the current buf has been decompress ed and written directly_ Buffer function production; No specific compression method is used to de compress the post flush_buffer implementation
write_buffer parses the buf fer data through the following functions to complete the creation of the root file system
static __initdata int (*actions[])(void) = {
[Start] = do_start,
[Collect] = do_collect,
[GotHeader] = do_header,
[SkipIt] = do_skip,
[GotName] = do_name,
[CopyFile] = do_copy,
[GotSymlink] = do_symlink,
[Reset] = do_reset,
}; 
6. Run the application in the file system
//kernel_ In the init function, execute ramdisk_execute_command application, where ramdisk_execute_command passed in from cmdline
if (ramdisk_execute_command) {
if (!run_init_process(ramdisk_execute_command))
return 0;
pr_err("Failed to execute %s\n", ramdisk_execute_command);
}