Hello, great Xia. Welcome to the FPGA technology Jianghu. The Jianghu is so big. It's fate to meet each other.
Today, I will bring you the design of Ethernet controller (MAC) based on FPGA. Due to the long length, it is divided into three parts. Today, I will bring the third and second part, the simulation, testing and summary of the program. Don't talk much, load the goods.
Hyperlinks to the first two articles are also given here:
Design of Ethernet controller (MAC) based on FPGA (Part I)
Design of Ethernet controller (MAC) based on FPGA (in)
Reading guide
At present, the Internet has greatly changed our production and life. Accordingly, in the research and development of embedded system, more and more attention is paid to network function. Embedded system is no longer limited to isolated control and processing units, but towards network integration, so as to realize the centralized control and information sharing of multiple systems.
The development and application of Ethernet technology in embedded system has become one of the technical hotspots in the current embedded research field. On the one hand, compared with traditional RS-485 and CAN, Ethernet is more high-speed and universal, and CAN also be directly connected with the Internet to provide a wider range of remote access; In addition, the properly tailored and optimized TCP/IP protocol stack CAN also fully meet the needs of industrial applications. On the other hand, it has obvious advantages over IEEE 1394.0 bus in terms of generic cabling and software transmission cost.
The embedded system based on Ethernet has good application prospects in the following aspects:
• industry: industrial control, network instruments, remote distributed data acquisition
• home automation: smart home, information appliances, home gateway
• business: remote sales platform, intelligent vending machine, public telephone card issuing system
• environmental protection: water source and air pollution monitoring, flood control system and water and soil quality monitoring, dam safety
• others: traffic management, vehicle navigation, automatic meter reading
Therefore, when using FPGA to design various embedded application systems, we need to consider providing Ethernet interface for the system. This chapter will implement an Ethernet controller (MAC) example through FPGA, and introduce the implementation process in detail.
Abstract of the third part: this part will introduce the simulation, testing and summary of the program, including the top-level program, external PHY chip simulation program, simulation results and other related contents.
4, Simulation and test of program
The main part of the program has been introduced above. In order to check whether the program realizes the preset function, it is necessary to write a simulation program.
The simulation program (Testbench) of Ethernet controller needs to simulate both ends of data communication at the same time: host (upper layer protocol) and external PHY chip. Therefore, the structure of the design simulation program is shown in Figure 12.
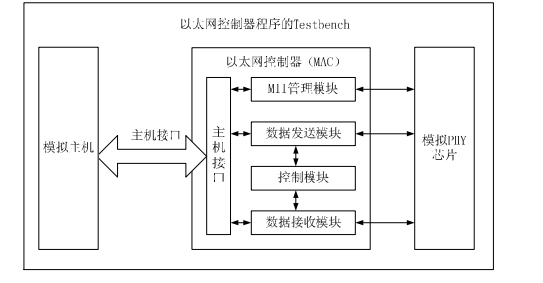
Figure 12 structure of Ethernet controller program Testbench
As can be seen from Figure 12, the simulation program should include: top-level program, simulated PHY program, simulated host program and Ethernet control program.
4.1 top level procedure
The top-level program is responsible for connecting all parts of the simulation program: simulation PHY program, simulation host program and Ethernet control program. At the same time, the top-level program needs to control the simulation. The main codes are as follows:
`include "eth_phy_defines.v"
`include "wb_model_defines.v"
`include "tb_eth_defines.v"
`include "eth_defines.v"
`include "timescale.v"
module tb_ethernet();
//Register and connection
reg wb_clk;
......
//Connecting Ethernet controller
eth_top eth_top(
.wb_clk_i(wb_clk), .wb_rst_i(wb_rst),
.wb_adr_i(eth_sl_wb_adr_i[11:2]), .wb_sel_i(eth_sl_wb_sel_i), .wb_we_i(eth_sl_wb_we_i),
.wb_cyc_i(eth_sl_wb_cyc_i), .wb_stb_i(eth_sl_wb_stb_i), .wb_ack_o(eth_sl_wb_ack_o),
.wb_err_o(eth_sl_wb_err_o), .wb_dat_i(eth_sl_wb_dat_i), .wb_dat_o(eth_sl_wb_dat_o),
.m_wb_adr_o(eth_ma_wb_adr_o), .m_wb_sel_o(eth_ma_wb_sel_o), .m_wb_we_o(eth_ma_wb_we_o), .m_wb_dat_i(eth_ma_wb_dat_i), .m_wb_dat_o(eth_ma_wb_dat_o), .m_wb_cyc_o(eth_ma_wb_cyc_o),
.m_wb_stb_o(eth_ma_wb_stb_o), .m_wb_ack_i(eth_ma_wb_ack_i), .m_wb_err_i(eth_ma_wb_err_i),
//send data
.mtx_clk_pad_i(mtx_clk), .mtxd_pad_o(MTxD), .mtxen_pad_o(MTxEn), .mtxerr_pad_o(MTxErr),
//Receiving data part
.mrx_clk_pad_i(mrx_clk), .mrxd_pad_i(MRxD), .mrxdv_pad_i(MRxDV), .mrxerr_pad_i(MRxErr),
.mcoll_pad_i(MColl), .mcrs_pad_i(MCrs),
//Media independent interface module
.mdc_pad_o(Mdc_O), .md_pad_i(Mdi_I), .md_pad_o(Mdo_O), .md_padoe_o(Mdo_OE),
.int_o(wb_int)
)
//PHY connection part
assign Mdio_IO = Mdo_OE ? Mdo_O : 1'bz ;
assign Mdi_I = Mdio_IO;
integer phy_log_file_desc;
eth_phy eth_phy(
.m_rst_n_i(!wb_rst),
// MAC send data
.mtx_clk_o(mtx_clk), .mtxd_i(MTxD), .mtxen_i(MTxEn), .mtxerr_i(MTxErr),
// MAC receive data
.mrx_clk_o(mrx_clk), .mrxd_o(MRxD), .mrxdv_o(MRxDV), .mrxerr_o(MRxErr),
.mcoll_o(MColl), .mcrs_o(MCrs),
//Media independent interface module
.mdc_i(Mdc_O), .md_io(Mdio_IO),
.phy_log(phy_log_file_desc)
);
// Connecting the host module
integer host_log_file_desc;
WB_MASTER_BEHAVIORAL wb_master(
.CLK_I(wb_clk),
.RST_I(wb_rst),
.TAG_I({`WB_TAG_WIDTH{1'b0}}),
.TAG_O(),
.ACK_I(eth_sl_wb_ack_o),
.ADR_O(eth_sl_wb_adr), // only eth_sl_wb_adr_i[11:2] used
.CYC_O(eth_sl_wb_cyc_i),
.DAT_I(eth_sl_wb_dat_o),
.DAT_O(eth_sl_wb_dat_i),
.ERR_I(eth_sl_wb_err_o),
.RTY_I(1'b0), // inactive (1'b0)
.SEL_O(eth_sl_wb_sel_i),
.STB_O(eth_sl_wb_stb_i),
.WE_O (eth_sl_wb_we_i),
.CAB_O() // NOT USED for now!
)
assign eth_sl_wb_adr_i = {20'h0, eth_sl_wb_adr[11:2], 2'h0};
......
//initialization
initial
begin
//Reset signal
wb_rst = 1'b1;
#423 wb_rst = 1'b0;
//Clear memory contents
clear_memories;
clear_buffer_descriptors;
#423 StartTB = 1'b1;
end
//Generate clock signal
initial
begin
wb_clk=0;
forever #15 wb_clk = ~wb_clk; // 2*10 ns -> 33.3 MHz
end
integer tests_successfull;
integer tests_failed;
reg [799:0] test_name; // used for tb_log_file
reg [3:0] wbm_init_waits; // initial wait cycles between CYC_O and STB_O of WB Master
reg [3:0] wbm_subseq_waits; // subsequent wait cycles between STB_Os of WB Master
reg [2:0] wbs_waits; // wait cycles befor WB Slave responds
reg [7:0] wbs_retries; // if RTY response, then this is the number of retries before ACK
reg wbm_working; // tasks wbm_write and wbm_read set signal when working and resetit when stop working
//Start test content
initial
begin
wait(StartTB); // Start testing
//Initialize global variables
tests_successfull = 0;
tests_failed = 0;
wbm_working = 0;
wbm_init_waits = 4'h1;
wbm_subseq_waits = 4'h3;
wbs_waits = 4'h1;
wbs_retries = 8'h2;
wb_slave.cycle_response(`ACK_RESPONSE, wbs_waits, wbs_retries);
//Each task of the test
test_note("PHY generates ideal Carrier sense and Collision signals for following tests");
eth_phy.carrier_sense_real_delay(0);
test_mac_full_duplex_transmit(0, 21); //Test data transmission in full duplex mode
test_mac_full_duplex_receive(0, 13); //Test receiving data in full duplex mode
test_mac_full_duplex_flow_control(0, 4); // Test the whole data flow
test_note("PHY generates 'real delayed' Carrier sense and Collision signals for following
tests");
eth_phy.carrier_sense_real_delay(1);
// End test
test_summary;
$stop;
endThe test content is executed through multiple test tasks. Limited by space, the contents of test tasks are not listed one by one.
4.2 external PHY chip simulation program
The simulation program simulates the simplified LXT971A chip (the external PHY chip of Inter company). PHY chip is connected to Ethernet controller through MIIM (media independent interface management module), so:
• when the Ethernet controller sends data to the PHY chip simulator, the PHY chip simulator controls the data transmission according to the protocol;
• when the PHY chip sends data to the Ethernet controller, the external PHY chip simulation program first generates the data to be transmitted according to the protocol requirements, and then sends it to the Ethernet controller.
The main codes of external PHY chip simulation program are as follows:
`include "timescale.v"
`include "eth_phy_defines.v"
`include "tb_eth_defines.v"
module eth_phy (m_rst_n_i, mtx_clk_o, mtxd_i, mtxen_i, mtxerr_i, mrx_clk_o, mrxd_o, mrxdv_o,
mrxerr_o,mcoll_o, mcrs_o,mdc_i, md_io, phy_log);
//Input / output signal
input m_rst_n_i;
......
//Registers and connections
reg control_bit15; // self clearing bit
......
// MIIM part of PHY chip simulation program
......
//initialization
initial
begin
md_io_enable = 1'b0;
respond_to_all_phy_addr = 1'b0;
no_preamble = 1'b0;
end
// Put the output in three states
assign #1 md_io = (m_rst_n_i && md_io_enable) ? md_io_output : 1' bz ;
//Register input
always@(posedge mdc_i or negedge m_rst_n_i)
begin
if (!m_rst_n_i)
md_io_reg <= #1 0;
else
md_io_reg <= #1 md_io;
end
// Get PHY address, register address and data input, and shift the data to be output
// putting Data out and shifting
always@(posedge mdc_i or negedge m_rst_n_i)
begin
if (!m_rst_n_i)
begin
phy_address <= 0;
reg_address <= 0;
reg_data_in <= 0;
reg_data_out <= 0;
md_io_output <= 0;
end
else
begin
if (md_get_phy_address)
begin
phy_address[4:1] <= phy_address[3:0]; // correct address is `ETH_PHY_ADDR
phy_address[0] <= md_io;
end
if (md_get_reg_address)
begin
reg_address[4:1] <= reg_address[3:0];
reg_address[0] <= md_io;
end
if (md_get_reg_data_in)
begin
reg_data_in[15:1] <= reg_data_in[14:0];
reg_data_in[0] <= md_io;
end
if (md_put_reg_data_out)
begin
reg_data_out <= register_bus_out;
end
if (md_io_enable)
begin
md_io_output <= reg_data_out[15];
reg_data_out[15:1] <= reg_data_out[14:0];
reg_data_out[0] <= 1'b0;
end
end
end
assign #1 register_bus_in = reg_data_in; // md_put_reg_data_in - allows writing to a selected
register
// Statistics of data transmitted through MIIM (media independent interface management module)
always@(posedge mdc_i or negedge m_rst_n_i)
begin
if (!m_rst_n_i)
begin
if (no_preamble)
md_transfer_cnt <= 33;
else
md_transfer_cnt <= 1;
end
else
begin
if (md_transfer_cnt_reset)
begin
if (no_preamble)
md_transfer_cnt <= 33;
else
md_transfer_cnt <= 1;
end
else if (md_transfer_cnt < 64)
begin
md_transfer_cnt <= md_transfer_cnt + 1'b1;
end
else
begin
if (no_preamble)
md_transfer_cnt <= 33;
else
md_transfer_cnt <= 1;
end
end
end
// Transmission control of MIIM
always@(m_rst_n_i or md_transfer_cnt or md_io_reg or md_io_rd_wr orphy_address or respond_to_all_phy_addr or no_preamble)
begin
#1;
while ((m_rst_n_i) && (md_transfer_cnt <= 64))
begin
// Reset signal
// Check header
if (md_transfer_cnt < 33)
begin
#4 md_put_reg_data_in = 1'b0;
if (md_io_reg !== 1'b1)
begin
#1 md_transfer_cnt_reset = 1'b1;
end
else
begin
#1 md_transfer_cnt_reset = 1'b0;
end
end
//Check start bit
else if (md_transfer_cnt == 33)
begin
if (no_preamble)
begin
#4 md_put_reg_data_in = 1'b0;
if (md_io_reg === 1'b0)
begin
#1 md_transfer_cnt_reset = 1'b0;
end
else
begin
#1 md_transfer_cnt_reset = 1'b1;
//if ((md_io_reg !== 1'bz) && (md_io_reg !== 1'b1))
if (md_io_reg !== 1'bz)
begin
//error
`ifdef VERBOSE
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong first start bit (without preamble)",
$time);
`endif
#10 $stop;
end
end
end
else // with preamble
begin
#4 ;
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m)MIIM - 32-bit preamble received", $time);
`endif
// check start bit only if md_transfer_cnt_reset is inactive, because if
// preamble suppression was changed start bit should not be checked
if ((md_io_reg !== 1'b0) && (md_transfer_cnt_reset == 1'b0))
begin
// error
`ifdef VERBOSE
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong first start bit", $time);
`endif
#10 $stop;
end
end
end
else if (md_transfer_cnt == 34)
begin
#4;
if (md_io_reg !== 1'b1)
begin
// error
#1;
`ifdef VERBOSE
if (no_preamble)
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong second start bit (without preamble)",
$time);
else
$fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong second start bit", $time);
`endif
#10 $stop;
end
else
begin
`ifdef VERBOSE
if (no_preamble)
#1 $fdisplay(phy_log, " (%0t)(%m)MIIM - 2 start bits received (without preamble)",$time);
else
#1 $fdisplay(phy_log, " (%0t)(%m)MIIM - 2 start bits received", $time);
`endif
end
end
// Register op code
else if (md_transfer_cnt == 35)
begin
#4;
if (md_io_reg === 1'b1)
begin
#1 md_io_rd_wr = 1'b1;
end
else
begin
#1 md_io_rd_wr = 1'b0;
end
end
else if (md_transfer_cnt == 36)
begin
#4;
if ((md_io_reg === 1'b0) && (md_io_rd_wr == 1'b1))
begin
#1 md_io_rd_wr = 1'b1; // reading from PHY registers
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m)MIIM - op-code for READING from registers", $time);
`endif
end
else if ((md_io_reg === 1'b1) && (md_io_rd_wr == 1'b0))
begin
#1 md_io_rd_wr = 1'b0; // writing to PHY registers
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m)MIIM - op-code for WRITING to registers", $time);
`endif
end
else
begin
// Opcode error
`ifdef VERBOSE
#1 $fdisplay(phy_log, "*E (%0t)(%m)MIIM - wrong OP-CODE", $time);
`endif
#10 $stop;
end
// Get PHY address
begin
#1 md_get_phy_address = 1'b1;
end
end
else if (md_transfer_cnt == 41)
begin
#4 md_get_phy_address = 1'b0;
// set the signal - get register address
#1 md_get_reg_address = 1'b1;
end
// Get register address
else if (md_transfer_cnt == 46)
begin
#4 md_get_reg_address = 1'b0;
#1 md_put_reg_data_out = 1'b1;
end
......
// Control of data transmission between PHY chip and Ethernet controller
// register
reg mcoll_o;
......
//Initialize all registers
initial
begin
mcrs_rx = 0;
mcrs_tx = 0;
task_mcoll = 0;
task_mcrs = 0;
task_mcrs_lost = 0;
no_collision_in_half_duplex = 0;
collision_in_full_duplex = 0;
no_carrier_sense_in_tx_half_duplex = 0;
no_carrier_sense_in_rx_half_duplex = 0;
carrier_sense_in_tx_full_duplex = 0;
no_carrier_sense_in_rx_full_duplex = 0;
real_carrier_sense = 0;
end
// Data conflict
always@(m_rst_n_i or control_bit8_0 or collision_in_full_duplex or
mcrs_rx or mcrs_tx or task_mcoll or no_collision_in_half_duplex)
begin
if (!m_rst_n_i)
mcoll_o = 0;
else
begin
if (control_bit8_0[8]) // full duplex
begin
if (collision_in_full_duplex) // collision is usually not asserted in full duplex
begin
mcoll_o = ((mcrs_rx && mcrs_tx) || task_mcoll);
`ifdef VERBOSE
if (mcrs_rx && mcrs_tx)
$fdisplay(phy_log, " (%0t)(%m) Collision set in FullDuplex!", $time);
if (task_mcoll)
$fdisplay(phy_log, " (%0t)(%m) Collision set in FullDuplex from TASK!", $time);
`endif
end
else
begin
mcoll_o = task_mcoll;
`ifdef VERBOSE
if (task_mcoll)
$fdisplay(phy_log, " (%0t)(%m) Collision set in FullDuplex from TASK!", $time);
`endif
end
end
else // half duplex
begin
mcoll_o = ((mcrs_rx && mcrs_tx && !no_collision_in_half_duplex) ||task_mcoll);
`ifdef VERBOSE
if (mcrs_rx && mcrs_tx)
$fdisplay(phy_log, " (%0t)(%m) Collision set in HalfDuplex!", $time);
if (task_mcoll)
$fdisplay(phy_log, " (%0t)(%m) Collision set in HalfDuplex from TASK!", $time);
`endif
end
end
end
//Carrier sense multiple access
always@(m_rst_n_i or control_bit8_0 or carrier_sense_in_tx_full_duplex or
no_carrier_sense_in_rx_full_duplex or
no_carrier_sense_in_tx_half_duplex or
no_carrier_sense_in_rx_half_duplex or
mcrs_rx or mcrs_tx or task_mcrs or task_mcrs_lost)
begin
if (!m_rst_n_i)
mcrs_o = 0;
else
begin
if (control_bit8_0[8]) // full duplex
begin
if (carrier_sense_in_tx_full_duplex) // carrier sense is usually not asserted duringTX in full duplex
mcrs_o = ((mcrs_rx && !no_carrier_sense_in_rx_full_duplex) ||
mcrs_tx || task_mcrs) && !task_mcrs_lost;
else
mcrs_o = ((mcrs_rx && !no_carrier_sense_in_rx_full_duplex) ||
task_mcrs) && !task_mcrs_lost;
end
else // half duplex
begin
mcrs_o = ((mcrs_rx && !no_carrier_sense_in_rx_half_duplex) ||
(mcrs_tx && !no_carrier_sense_in_tx_half_duplex) ||
task_mcrs) && !task_mcrs_lost;
end
end
end
// Ethernet controller sends data and PHY chip receives data
//register
reg [7:0] tx_mem [0:4194303]; // 4194304 is all the addresses that can be provided by the 22 bit address line, and each address is 8 bits
......
//Send data control
always@(posedge mtx_clk_o)
begin
// Save the data and check the basic frame data
if (!m_rst_n_i)
begin
tx_cnt <= 0;
tx_preamble_ok <= 0;
tx_sfd_ok <= 0;
tx_len <= 0;
tx_len_err <= 0;
end
else
begin
if (!mtxen_i)
begin
tx_cnt <= 0;
end
else
begin
//A counter that sends four byte data
tx_cnt <= tx_cnt + 1;
//Set the initialization value and check the header of the first four byte data
if (tx_cnt == 0)
begin
`ifdef VERBOSE
$fdisplay(phy_log, " (%0t)(%m) TX frame started with tx_en set!", $time);
`endif
if (mtxd_i == 4'h5)
tx_preamble_ok <= 1;
else
tx_preamble_ok <= 0;
tx_sfd_ok <= 0;
tx_byte_aligned_ok <= 0;
tx_len <= 0;
tx_len_err <= 0;
end
// Check header
if ((tx_cnt > 0) && (tx_cnt <= 13))
begin
if ((tx_preamble_ok != 1) || (mtxd_i != 4'h5))
tx_preamble_ok <= 0;
end
// Check SFD
if (tx_cnt == 14)
begin
`ifdef VERBOSE
if (tx_preamble_ok == 1)
$fdisplay(phy_log, " (%0t)(%m) TX frame preamble OK!", $time);
else
$fdisplay(phy_log, "*E (%0t)(%m) TX frame preamble NOT OK!", $time);
`endif
if (mtxd_i == 4'h5)
tx_sfd_ok <= 1;
else
tx_sfd_ok <= 0;
end
if (tx_cnt == 15)
begin
if ((tx_sfd_ok != 1) || (mtxd_i != 4'hD))
tx_sfd_ok <= 0;
end
// Control storage address, data type / length, data content and FCS to send data buffer
if (tx_cnt > 15)
begin
if (tx_cnt == 16)
begin
`ifdef VERBOSE
if (tx_sfd_ok == 1)
$fdisplay(phy_log, " (%0t)(%m) TX frame SFD OK!", $time);
else
$fdisplay(phy_log, "*E (%0t)(%m) TX frame SFD NOT OK!", $time);
`endif
end
if (tx_cnt[0] == 0)
begin
tx_mem_data_in[3:0] <= mtxd_i; // storing LSB nibble
tx_byte_aligned_ok <= 0; // if transfer will stop after this, then there was driblenibble
end
else
begin
tx_mem[tx_mem_addr_in[21:0]] <= {mtxd_i, tx_mem_data_in[3:0]}; // storing data into
tx memory
tx_len <= tx_len + 1; // enlarge byte length counter
tx_byte_aligned_ok <= 1; // if transfer will stop after this, then transfer is byte
alligned
tx_mem_addr_in <= tx_mem_addr_in + 1'b1;
end
if (mtxerr_i)
tx_len_err <= tx_len;
end
end
end
//Generating a carrier signal for transmitting data
if (!m_rst_n_i)
begin
mcrs_tx <= 0;
mtxen_d1 <= 0;
mtxen_d2 <= 0;
mtxen_d3 <= 0;
mtxen_d4 <= 0;
mtxen_d5 <= 0;
mtxen_d6 <= 0;
end
else
begin
mtxen_d1 <= mtxen_i;
mtxen_d2 <= mtxen_d1;
mtxen_d3 <= mtxen_d2;
mtxen_d4 <= mtxen_d3;
mtxen_d5 <= mtxen_d4;
mtxen_d6 <= mtxen_d5;
if (real_carrier_sense)
mcrs_tx <= mtxen_d6;
else
mcrs_tx <= mtxen_i;
end
end
`ifdef VERBOSE
reg frame_started;
initial
begin
frame_started = 0;
end
always@(posedge mtxen_i)
begin
frame_started <= 1;
end
always@(negedge mtxen_i)
begin
if (frame_started)
begin
$fdisplay(phy_log, " (%0t)(%m) TX frame ended with tx_en reset!", $time);
frame_started <= 0;
end
end
always@(posedge mrxerr_o)
begin
$fdisplay(phy_log, " (%0t)(%m) RX frame ERROR signal was set!", $time);
end
`endif
......
endmodule4.3 simulation results
As shown in Figure 13, it is the test of data transmission in full duplex mode. The highlighted MTxD in the figure is the data output of Ethernet controller.
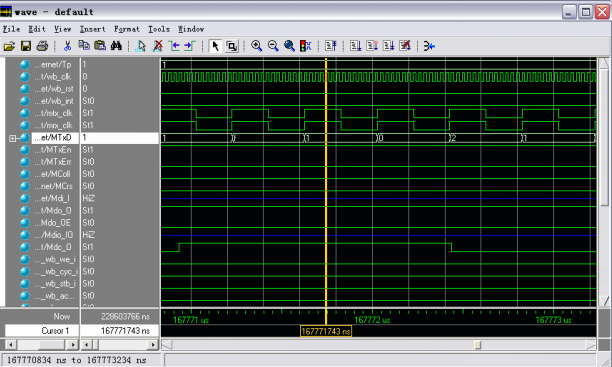
Fig. 13 test results of transmitting data in full duplex mode
As shown in Figure 14, it is the test of receiving data in full duplex mode. The MRxD highlighted in the figure is the input of data received by Ethernet controller.

Fig. 14 test results of received data in full duplex mode
Figure 15 shows the test results of the whole process of data transmission and reception in full duplex mode. The highlighted MTxD and MRxD in the figure are the output and input ports of Ethernet controller for transmitting and receiving data.
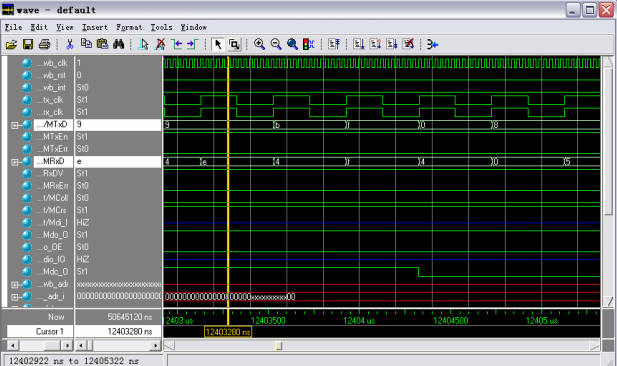
FIG. 15 test results of the whole process of data transmission and reception in full dual mode
FIG. 16 shows the test results of the whole process of transmitting and receiving data in half duplex mode.
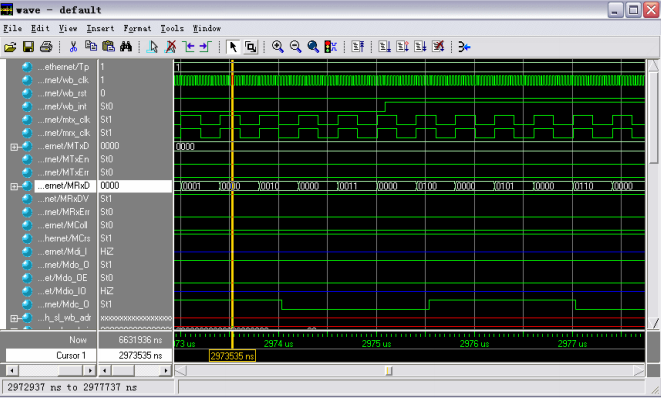
FIG. 16 test results of the whole process of sending and receiving data in half duplex mode
5, Summary
This paper introduces an example of Ethernet controller (MAC). Firstly, the basic principle of Ethernet is introduced, and then the main structure of Ethernet controller program and the implementation process of main functional modules are introduced. Finally, a test program is used to verify whether the function of the program meets the requirements. This chapter provides a useful scheme for readers to design their own Ethernet controller, and helps to deepen their understanding of Ethernet protocol.
This is the end of this article. Great Xia, goodbye! ENDThe follow-up will be continuously updated, bringing installation related design tutorials such as Vivado, ISE, Quartus II and candence, learning resources, project resources, good article recommendations, etc. I hope you will continue to pay attention.
Heroes, the Jianghu is so big. Continue to wander. May everything be well. See you again!