Article Directory
Relationship Fitting (Regression)
Setting up datasets
Create some fake data to simulate the real situation. For example, a quadratic function of one variable: y = a * x^2 + b, add a little noise to the Y data to show it more realistically.
#Relationship Fitting (Regression) import torch from torch.autograd import Variable import torch.nn.functional as F import matplotlib.pyplot as plt #fake data x=torch.unsqueeze(torch.linspace(-1,1,100),dim=1) #unsqueeze transforms one dimension into two dimensions y=x.pow(2)+0.2*torch.rand(x.size()) # Quadratic+Noise Effect plt.scatter(x.data.numpy(),y.data.numpy()) #Scatter plot plt.show()
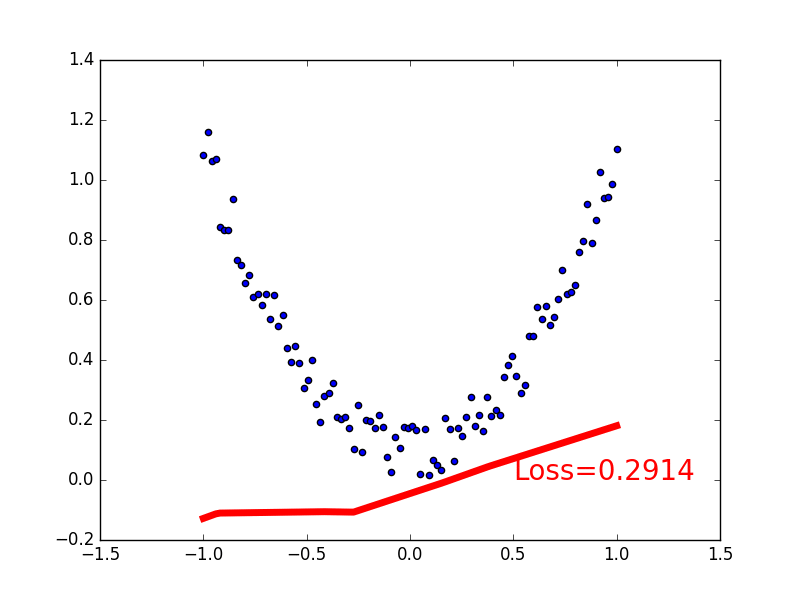
Establishing a neural network
Establishing a neural network can directly apply the torch system. First all the layer attributes (init()) are defined, then the layer-by-layer relationship links (forward(x)) are built.
#Relationship Fitting (Regression) import torch from torch.autograd import Variable import torch.nn.functional as F import matplotlib.pyplot as plt class Net(torch.nn.Module):#Module is the main module of net #Two functions required to build torch def __init__(self,n_feature,n_hidden,n_output):#Information needed to set up the net super(Net,self).__init__()#Inherit net to Module module and output init function #Below is the layer information, which is all attributes self.hidden=torch.nn.Linear(n_feature,n_hidden)#How many inputs and how many outputs self.predict = torch.nn.Linear(n_hidden,n_output) def forward(self,x):#The process of forward propagation, forward propagation of input values, and neural network analysis of output values x=F.relu(self.hidden(x))#x outputs n_hidden through hidden, then nests with relu activation function x=self.predict(x)#Put the above X in predict Output Layer Output x #The output layer does not use the excitation function, because in most regression problems #In most regression problems, the predicted value is distributed from positive to negative infinity. #Use the excitation function to truncate the value a little, predict doesn't like the result of truncation return x #Define net #!!!!Don't hit in class net=Net(n_feature=1,n_hidden=10,n_output=1)#x value 1, hidden layer (neuron 10), y1 print(net) plt.ion() #Real-time Drawing plt.show() #Optimize Network optimizer=torch.optim.SGD(net.parameters(),lr=0.2)#Higher, faster #Using optim optimizer to optimize the parameters of the neural network, the learning efficiency is 0.2 loss_func=torch.nn.MSELoss()#Mean Square Variance of MSELoss() for Optimizing Errors #Start training for t in range(100):#100 steps prediction=net(x)#Input Information Prediction Value loss=loss_func(prediction,y)#Errors in prediction and y prediction optimizer.zero_grad()#All parameter gradients are reduced to zero loss.backward()#Reverse transfer to compute gradient for each neural network node optimizer.step()#Optimal Gradient if t % 5 == 0: # plot and show learning process plt.cla() plt.scatter(x.data.numpy(), y.data.numpy()) plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5) plt.text(0.2, 0, 'Loss=%.4f' % loss.data, fontdict={'size': 20, 'color': 'red'}) plt.pause(0.1) plt.ioff() plt.show()
Distinguish types (classifications)
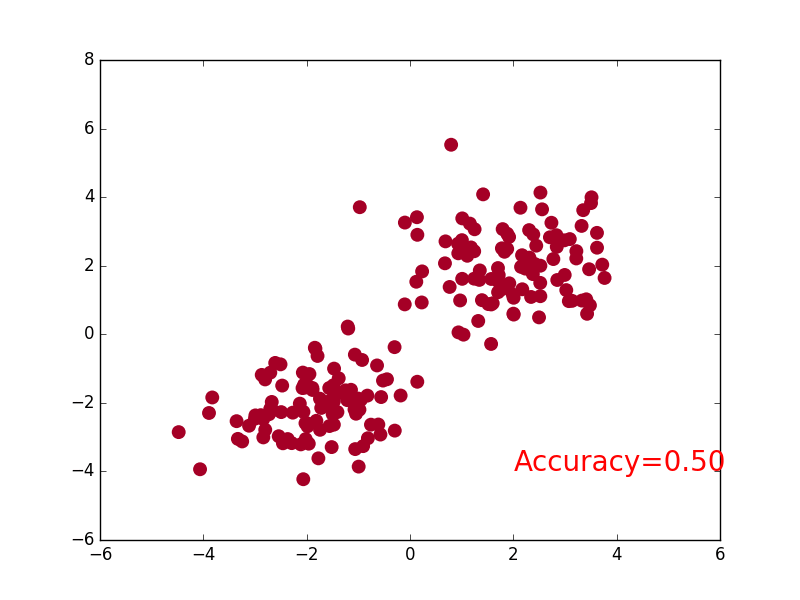
Create some fake data to simulate the real situation. For example, two quadratic distributions of data, but their mean values are different. Establish a neural network that directly uses the system in torch. Define all layer attributes (init()) first, and then build (forward(x)) layer-by-layer relationship links.
This is basically the same as the neural network used in the previous regression.
import torch import matplotlib.pyplot as plt import torch.nn.functional as F # False Data n_data = torch.ones(100, 2) # The basic form of the data x contains a horizontal and vertical coordinate y of type x0 = torch.normal(2*n_data, 1) # Type 0 x data (tensor), shape=(100, 2) y0 = torch.zeros(100) # Label 0 x1 = torch.normal(-2*n_data, 1) # Type 1 x data (tensor), shape=(100, 1) y1 = torch.ones(100) # Label 1 # Note that x, y data must be in the form of the following (torch.cat is merging data) x = torch.cat((x0, x1), 0).type(torch.FloatTensor) #The data must be FloatTensor = 32-bit floating #x Merge together to make data y = torch.cat((y0, y1), ).type(torch.LongTensor) # Label must be LongTensor = 64-bit integer # y merge together to label 0. # plt.scatter(x.data.numpy()[:, 0], x.data.numpy()[:, 1], c=y.data.numpy(), s=100, lw=0, cmap='RdYlGn') # plt.show() class Net(torch.nn.Module): # Module inheriting torch def __init__(self, n_feature, n_hidden, n_output): super(Net, self).__init__() # Inherit u init_u Function self.hidden = torch.nn.Linear(n_feature, n_hidden) # Hidden Layer Linear Output self.out = torch.nn.Linear(n_hidden, n_output) # Output Layer Linear Output def forward(self, x): # Forward propagation of input values and output values from neural network analysis x = F.relu(self.hidden(x)) # Excitation Function (Linear Value of Hidden Layer) x = self.out(x) # Output value, but this is not a predicted value and the predicted value needs to be calculated return x net = Net(n_feature=2, n_hidden=10, n_output=2) # Several categories are just a few output s #The x input is 2 features (x, y coordinates) and the output is 2 features (0 and you) print(net) # The structure of net # optimizer is a training tool optimizer = torch.optim.SGD(net.parameters(), lr=0.02) # All parameters passed into net, learning rate loss_func = torch.nn.CrossEntropyLoss() #CrossEntropyLoss() Action Label Value: [0,0,1] Predictive Value: [0.1,0.3,0.6] Error between the two plt.ion() # Drawing plt.show() for t in range(100): out = net(x) # Feed net training data x, output analysis value loss = loss_func(out, y) # Calculating the Error of Both optimizer.zero_grad() # Empty the remaining update parameter values from the previous step loss.backward() # Error back-propagation, calculating parameter update values optimizer.step() # Applying parameter update values to net's parameters if t % 2 == 0: plt.cla() prediction = torch.max(out, 1)[1] #The location of the maximum value is where the index is 1 pred_y = prediction.data.numpy().squeeze() target_y = y.data.numpy() plt.scatter(x.data.numpy()[:, 0], x.data.numpy()[:, 1], c=pred_y, s=100, lw=0, cmap='RdYlGn') accuracy = float((pred_y == target_y).astype(int).sum()) / float(target_y.size) plt.text(1.5, -4, 'Accuracy=%.2f' % accuracy, fontdict={'size': 20, 'color': 'red'}) plt.pause(0.1) plt.ioff() # Stop drawing plt.show()
Quick build
The method used in regression inherits a torch's neural network structure with class, then modifies it to quickly build and summarize all of the above in one sentence!
class Net(torch.nn.Module): def __init__(self, n_feature, n_hidden, n_output): super(Net, self).__init__() self.hidden = torch.nn.Linear(n_feature, n_hidden) self.predict = torch.nn.Linear(n_hidden, n_output) def forward(self, x): x = F.relu(self.hidden(x)) x = self.predict(x) return x net1 = Net(1, 10, 1) # This is how we built net1
Quick build
net2 = torch.nn.Sequential( torch.nn.Linear(1, 10), torch.nn.ReLU(), torch.nn.Linear(10, 1) ) print(net1) """ Net ( (hidden): Linear (1 -> 10) (predict): Linear (10 -> 1) ) """ print(net2) """ Sequential ( (0): Linear (1 -> 10) (1): ReLU () (2): Linear (10 -> 1) ) """
net2 also includes the excitation function, but in net1, the excitation function is actually called in the forward() function.
This also shows that the advantage of Net1 over net2 is that you can personalize your own forward communication process, such as (RNN), to suit your personal needs.
However, net2 is more appropriate if you don't need a seven-eighty-eight process.
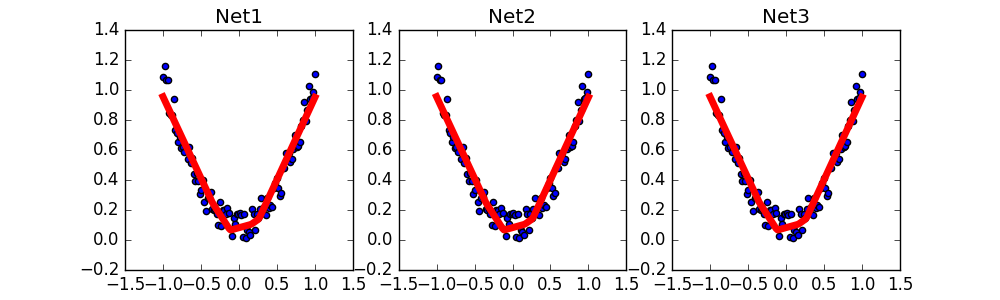
Save Extraction
A model has been trained and we want to save it so that we can use it directly the next time we want to use it. Here we use a regressed neural network as an example to save and extract.
A torch.save(net1,'net.pkl') that holds the entire neural network
A parameter torch.save(net1.state_dict(),'net_params.pkl') that stores neural networks
import torch import matplotlib.pyplot as plt #fake data x = torch.unsqueeze(torch.linspace(-1, 1, 100), dim=1) #unsqueeze transforms one dimension into two dimensions y = x.pow(2) + 0.2*torch.rand(x.size()) # Quadratic+Noise Effect #Save data def save(): #Build a network net1=torch.nn.Sequential( torch.nn.Linear(1,10), torch.nn.ReLU(), torch.nn.Linear(10,1) ) #Optimize Network optimizer=torch.optim.SGD(net1.parameters(),lr=0.2) loss_func=torch.nn.MSELoss() # Start training for t in range(100): # 100 steps prediction =net1(x) # Input Information Prediction Value loss = loss_func(prediction, y) # Errors in prediction and y prediction optimizer.zero_grad() # All parameter ladder loss = loss_func(prediction, y) degree reduced to 0 loss.backward() # Reverse transfer to compute gradient for each neural network node optimizer.step() # Optimal Gradient # Mapping plt.figure(1, figsize=(10, 3)) plt.subplot(131) plt.title('Net1') plt.scatter(x.data.numpy(), y.data.numpy()) plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5) torch.save(net1,'net.pkl')#Save the entire neural network #Saved Name torch.save(net1.state_dict(),'net_params.pkl')#Save parameters of the entire neural network def restore_net(): net2=torch.load('net.pkl') prediction=net2(x) # Mapping plt.subplot(132) plt.title('Net2') plt.scatter(x.data.numpy(), y.data.numpy()) plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5) def restore_parames(): #To extract parameters from net3, a network like net1 must be built first #Then copy the parameters of net1 to net3 net3 = torch.nn.Sequential( torch.nn.Linear(1, 10), torch.nn.ReLU(), torch.nn.Linear(10, 1) )#But the parameters inside are definitely different net3.load_state_dict(torch.load('net_params.pkl')) prediction=net3(x) # Mapping plt.subplot(133) plt.title('Net3') plt.scatter(x.data.numpy(), y.data.numpy()) plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5) plt.show() save() restore_net() restore_parames()
Batch Training
DataLoader
DataLoader is the tool torch gives you to wrap your data. So swap your own (numpy array or other) data format into Tensor and put it in this wrapper. DataLoader helps you iterate through your data effectively.
#Batch Processing import torch import torch.utils.data as Data BATCH_SIZE=5#A stack of data is divided into five groups and five groups x=torch.linspace(1,10,10)#Divide from 1 to 10 into 10 points y=torch.linspace(10,1,10)#From 10 to 1. #Define a database torch_dataset=Data.TensorDataset(x,y)#x training data y target data #Use loader to turn training into a small batch loader=Data.DataLoader( dataset=torch_dataset, batch_size=BATCH_SIZE, shuffle=True,#Do not randomly shuffle data during training and start sampling false again as no shuffling ) for epoch in range(3):#Training these 10 data three times as a whole for step,(batch_x,batch_y) in enumerate(loader):#Total training 3 times Each training is divided into 2 parts #The loader defines whether to shuffle the data without shuffling the data. The form of each training is the same: training data point 1 before training data point 2. #enumerate gives him an index each time it extracts. The first step is #training print('Epoch: ', epoch, '| Step: ', step, '| batch x: ', batch_x.numpy(), '| batch y: ', batch_y.numpy()) . . . Epoch: 0 | Step: 0 | batch x: [3. 5. 1. 4. 8.] | batch y: [ 8. 6. 10. 7. 3.] Epoch: 0 | Step: 1 | batch x: [ 2. 6. 10. 9. 7.] | batch y: [9. 5. 1. 2. 4.] Epoch: 1 | Step: 0 | batch x: [ 4. 2. 6. 7. 10.] | batch y: [7. 9. 5. 4. 1.] Epoch: 1 | Step: 1 | batch x: [9. 5. 8. 1. 3.] | batch y: [ 2. 6. 3. 10. 8.] Epoch: 2 | Step: 0 | batch x: [4. 7. 6. 2. 8.] | batch y: [7. 4. 5. 9. 3.] Epoch: 2 | Step: 1 | batch x: [10. 9. 1. 3. 5.] | batch y: [ 1. 2. 10. 8. 6.]
If BATCH_SIZE=5 is changed to 8 output
Epoch: 0 | Step: 0 | batch x: [2. 1. 5. 9. 7. 8. 4. 6.] | batch y: [ 9. 10. 6. 2. 4. 3. 7. 5.] Epoch: 0 | Step: 1 | batch x: [10. 3.] | batch y: [1. 8.] Epoch: 1 | Step: 0 | batch x: [4. 8. 6. 7. 1. 3. 2. 9.] | batch y: [ 7. 3. 5. 4. 10. 8. 9. 2.] Epoch: 1 | Step: 1 | batch x: [ 5. 10.] | batch y: [6. 1.] Epoch: 2 | Step: 0 | batch x: [ 3. 5. 9. 7. 10. 4. 6. 1.] | batch y: [ 8. 6. 2. 4. 1. 7. 5. 10.] Epoch: 2 | Step: 1 | batch x: [2. 8.] | batch y: [9. 3.]
Only the data left in this epoch will be returned to you at step=1
Optimizer
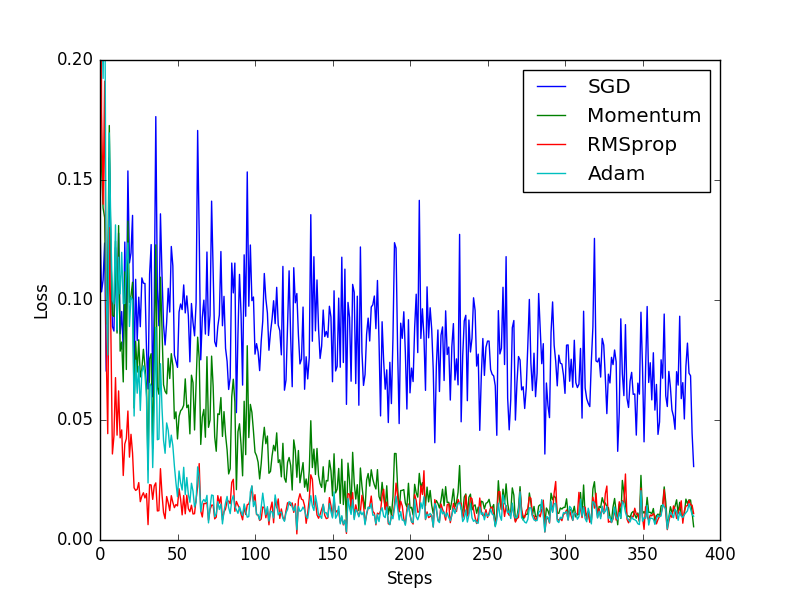
SGD is the most common optimizer, or has no acceleration effect, while Momentum is an improved version of SGD that incorporates a momentum principle.
The following RMprop is an upgrade of Momentum, while Adam is an upgrade of RMSprop.
However, from this result we can see that Adam seems to be less effective than RMSprop. So the more advanced the optimizer, the better the result.
We can try different optimizers in our own experiment to find the one that best suits your data/network.
import torch import torch.utils.data as Data import torch.nn.functional as F from torch.autograd import Variable import matplotlib.pyplot as plt #Hyperparameter LR=0.01 BATCH_SIZE=32 EPOCH=12 #Regressed data x = torch.unsqueeze(torch.linspace(-1, 1, 1000), dim=1) y = x.pow(2) + 0.1*torch.normal(torch.zeros(*x.size())) # plt.scatter(x.numpy(),y.numpy()) # plt.show() #Define a database torch_dataset=Data.TensorDataset(x,y) loader=Data.DataLoader( dataset=torch_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2,#Work Process ) #Establishing a neural network class Net(torch.nn.Module): def __init__(self): super(Net,self).__init__() self.hidden=torch.nn.Linear(1,20)#Hidden Layer self.predict=torch.nn.Linear(20,1)#output layer def forward(self,x): x=F.relu(self.hidden(x)) x=self.predict(x) return x #Four different neural networks if __name__ == '__main__': net_SGD = Net() net_Momentum= Net() net_RMSprop= Net() net_Adam= Net() nets = [net_SGD, net_Momentum, net_RMSprop, net_Adam] opt_SGD= torch.optim.SGD(net_SGD.parameters(), lr=LR) opt_Momentum= torch.optim.SGD(net_Momentum.parameters(), lr=LR, momentum=0.8) opt_RMSprop= torch.optim.RMSprop(net_RMSprop.parameters(), lr=LR, alpha=0.9) opt_Adam= torch.optim.Adam(net_Adam.parameters(), lr=LR, betas=(0.9, 0.99)) optimizers=[opt_SGD, opt_Momentum, opt_RMSprop, opt_Adam] #Start training loss_func = torch.nn.MSELoss()#Error calculation formula for regression losses_his = [[], [], [], []] # loss of different neural networks when recording training s for epoch in range(EPOCH): print('Epoch: ', epoch) for step, (b_x, b_y) in enumerate(loader): #Take out the different neural networks one by one for net, opt, l_his in zip(nets, optimizers, losses_his): output = net(b_x) # Input Information Prediction Value loss = loss_func(output, b_y) # Errors in prediction and y prediction opt.zero_grad() # All parameter gradients are reduced to zero loss.backward() # Reverse transfer to compute gradient for each neural network node opt.step() # Optimal Gradient l_his.append(loss.data.numpy())#Put errors in the record #Print labels = ['SGD', 'Momentum', 'RMSprop', 'Adam'] for i, l_his in enumerate(losses_his): plt.plot(l_his, label=labels[i]) plt.legend(loc='best') plt.xlabel('Steps') plt.ylabel('Loss') plt.ylim((0, 0.2)) plt.show()