preface
Image size, flipping and affine transformation in opencv
1, Image size transformation
Function prototype:
void resize(InputArray src, OutputArray dst, Size dsize, double fx=0, double fy=0, int interpolation = INTER_LINEAR)
src: input image
dst: output image. The data type of image is the same as src
dsize: output image size
fx: scale factor of horizontal axis
Scale factor of vertical axis: fy
Interpolation: Flag of interpolation method
Generally, dsize and fx (fy) can use one of them. In case of inconsistency between the final adjustment results of dsize and fx, dsize shall prevail
The interpolation selected for the last parameter will have different effect on the final scaling.
Interpolation method flag table:
| Flag parameters | Abbreviation | effect |
|---|---|---|
| INTER_NEAREST | 0 | Nearest neighbor interpolation |
| INTER_LINEAR | 1 | bilinear interpolation |
| INTER_CUBIC | 2 | Bicubic interpolation |
| INTER_AREA | 3 | Resampling using pixel area relationship is preferred for image reduction. The effect of image enlargement is the same as that of INTER_NEAREST similar |
| INTER_LANCZOS4 | 4 | Lanczos interpolation |
| INTER_LINEAR_EXACT | 5 | Bit exact bilinear interpolation |
| INTER_MAX | 7 | Interpolation with mask |
Example code:
#include<opencv2\opencv. HPP > / / load the header file of OpenCV4
#include<iostream>
#include<vector>
using namespace std;
using namespace cv; //OpenCV namespace
int main()
{
Mat gray = imread("lena.png", IMREAD_GRAYSCALE);
if (gray.empty())
{
cout << "Please confirm whether the image file name is correct" << endl;
return -1;
}
Mat smallImg, bigImg0, bigImg1, bigImg2;
resize(gray, smallImg, Size(15, 15), 0, 0, INTER_AREA); //Reduce the image first
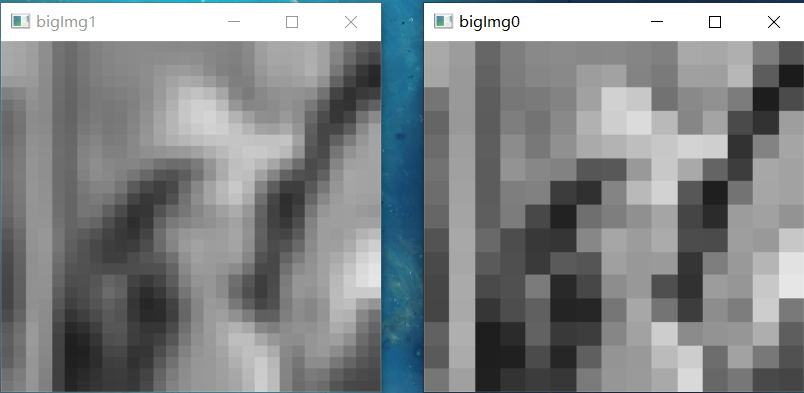
resize(smallImg, bigImg0, Size(30, 30), 0, 0, INTER_NEAREST); //Nearest neighbor interpolation
resize(smallImg, bigImg1, Size(30, 30), 0, 0, INTER_LINEAR); //bilinear interpolation
resize(smallImg, bigImg2, Size(30, 30), 0, 0, INTER_CUBIC); //Bicubic interpolation
namedWindow("smallImg", WINDOW_NORMAL); //If the image size is too small, be sure to set a flag that can adjust the window size
imshow("smallImg", smallImg);
namedWindow("bigImg0", WINDOW_NORMAL);
imshow("bigImg0", bigImg0);
namedWindow("bigImg1", WINDOW_NORMAL);
imshow("bigImg1", bigImg1);
namedWindow("bigImg2", WINDOW_NORMAL);
imshow("bigImg2", bigImg2);
waitKey(0);
return 0; //Program end
}
smallImg:
bigImg0:
2, Image flip transform
Image flipping model
void flip(InputArray src, OutputArray dst, int flipCode)
src: input image
dst: output image
flipcode: flip mode flag. If the value is greater than 0, it means turning around the y-axis; If the value is equal to 0, it means turning around the x-axis; A value less than 0 indicates flipping around two axes
Sample program:
#include<opencv2\opencv. HPP > / / load the header file of OpenCV4
#include<iostream>
#include<vector>
using namespace std;
using namespace cv; //OpenCV namespace
int main()
{
Mat img = imread("lena.png");
if (img.empty())
{
cout << "Please confirm whether the image file name is correct" << endl;
return -1;
}
Mat img_x, img_y, img_xy;
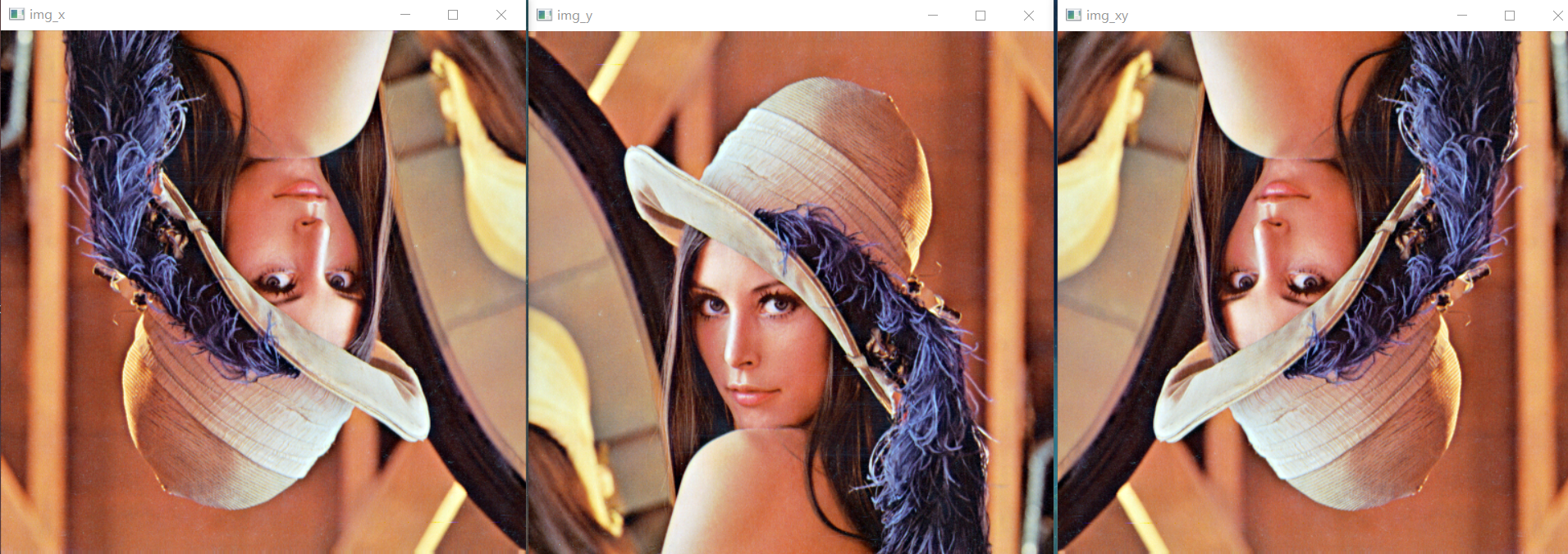
flip(img, img_x, 0); //Symmetrical with x axis
flip(img, img_y, 1); //Symmetric with y axis
flip(img, img_xy, -1); //Flip first on the x-axis and then on the y-axis
imshow("img", img);
imshow("img_x", img_x);
imshow("img_y", img_y);
imshow("img_xy", img_xy);
waitKey(0);
return 0; //Program end
}
Triple flip result: img_x, img_y, img_xy
3, Image affine transformation
The affine transformation of the image is used for image rotation. To realize image rotation, we first need to determine the rotation angle and rotation center, then confirm the rotation matrix, and finally realize image rotation through affine transformation.
The getRotationMatrix2D() function is used to calculate the rotation matrix
Mat getRotationMatrix2D(Point2f center, double angle, double scale)
Center: the center position of image rotation
Angle: the rotation angle of the image, in degrees, and a positive value is counterclockwise rotation
Scale: the scale factor of two axes, which can realize the image scaling in the process of rotation. If it is not scaled, enter 1
The image returns a Mat matrix
The function of the other three points corresponding to the transformation matrix M is:
getAffineTransform() function
Mat getAffineTransform(const Point2f src[], const Point2f dst[])
src []: coordinates of 3 pixels in the source image
dst []: coordinates of 3 pixels in the target image
Function returns a 2 * 3 transformation matrix
warpAffine() function prototype
void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags = INTER_LINEAR, int borderMode = BORDER_CONSTANT, const Scalar& borderValue = Scalar())
src: input image
dst: the output image after affine transformation, the same as src data type and the same size as dsize
M: 2 * 3 transformation matrix
dsize: the size of the output image
flags: interpolation method flag
borderMode: mark of pixel boundary extrapolation method
borderValue: the value used to fill the boundary, which is 0 by default
| Flag parameters | Abbreviation | effect |
|---|---|---|
| INTER_NEAREST | 0 | Nearest neighbor interpolation |
| INTER_LINEAR | 1 | bilinear interpolation |
| INTER_CUBIC | 2 | Bicubic interpolation |
| INTER_AREA | 3 | Resampling using pixel area relationship is preferred for image reduction. The effect of image enlargement is the same as that of INTER_NEAREST similar |
| INTER_LANCZOS4 | 4 | Lanczos interpolation |
| INTER_LINEAR_EXACT | 5 | Bit exact bilinear interpolation |
| INTER_MAX | 7 | Interpolation with mask |
| WARP_FILL_OUTLIERS | 8 | Fill all the pixels of the output image. If some pixels fall outside the boundary of the input image, their value is set to fillval |
| WARP_INVERSE_MAP | 16 | Set to M inverse transform from output image to input image |
Affine transformation is the general term of image rotation, translation and scaling operations, which can be expressed as the superposition of linear transformation and translation transformation. The mathematical representation of affine transformation is to multiply by a linear transformation matrix and add a translation vector.
Sample program:
#include<opencv2\opencv. HPP > / / load the header file of OpenCV4
#include<iostream>
#include<vector>
using namespace std;
using namespace cv; //OpenCV namespace
int main()
{
Mat img = imread("lena.png");
if (img.empty())
{
cout << "Please confirm whether the image file name is correct" << endl;
return -1;
}
Mat rotation0, rotation1, img_warp0, img_warp1;
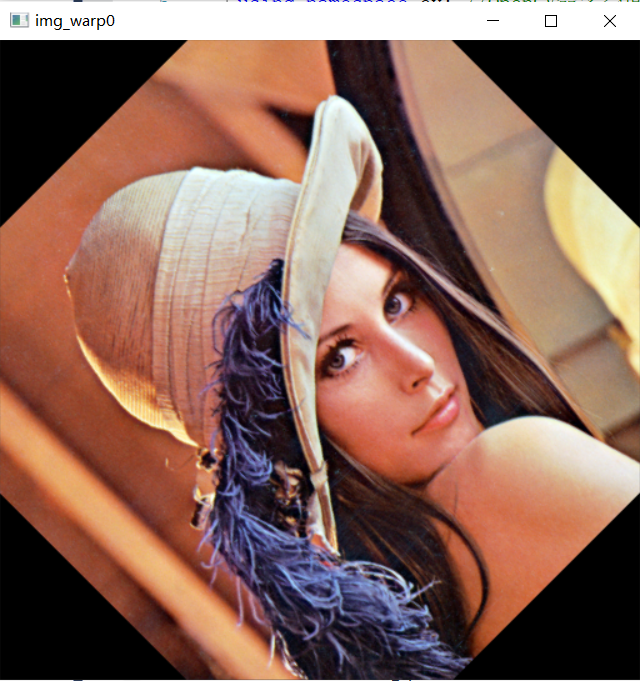
double angle = 45; //Sets the angle at which the image is rotated
Size dst_size(img.rows, img.cols); //Sets the size of the output image
Point2f center(img.rows / 2.0, img.cols / 2.0); //Sets the rotation center of the image
rotation0 = getRotationMatrix2D(center, angle, 1); //Computing affine transformation matrix
warpAffine(img, img_warp0, rotation0, dst_size); //Affine transformation
imshow("img_warp0", img_warp0);
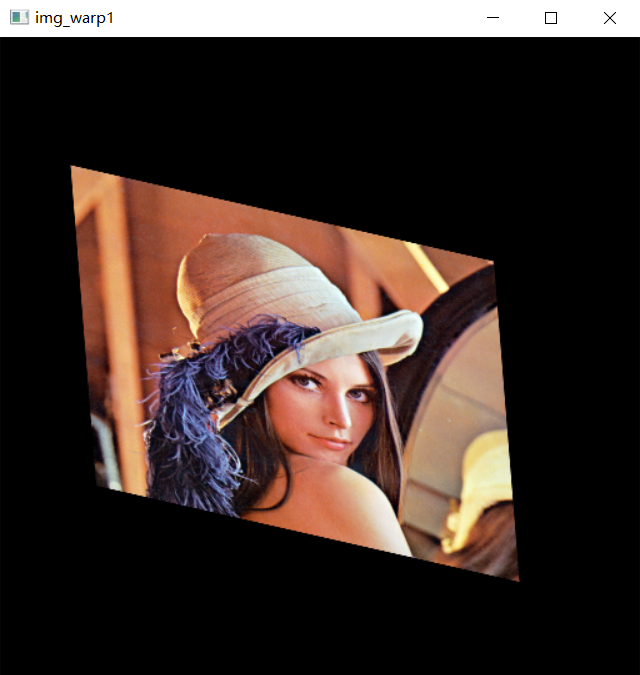
//Affine transformation is carried out according to the three defined points
Point2f src_points[3];
Point2f dst_points[3];
src_points[0] = Point2f(0, 0); //3 points in the original image
src_points[1] = Point2f(0, (float)(img.cols - 1));
src_points[2] = Point2f((float)(img.rows - 1), (float)(img.cols - 1));
//Three points in the image after affine transformation
dst_points[0] = Point2f((float)(img.rows)*0.11, (float)(img.cols)*0.20);
dst_points[1] = Point2f((float)(img.rows)*0.15, (float)(img.cols)*0.70);
dst_points[2] = Point2f((float)(img.rows)*0.81, (float)(img.cols)*0.85);
rotation1 = getAffineTransform(src_points, dst_points); //The affine transformation matrix is obtained according to the corresponding points
warpAffine(img, img_warp1, rotation1, dst_size); //Affine transformation
imshow("img_warp1", img_warp1);
waitKey(0);
return 0; //Program end
}
img_warp0:
img_warp1:
Thanks for reading!
You are also welcome to pay attention to Xiaobai blogger and give more encouragement!