This article is my recent self-study pytorch notes, according to Introduction to pytorch Basics Please correct any mistakes or misunderstandings in the notes of what you have learned. The feelings and experiences of this teaching video are at the end of the article. Love the official account if you like. Some of your learning experience and recommendations will be shared on the official account. The official account number is at the end of the article. I hope we can go forward in 2022!
CUDA NVIDIA for hardware acceleration
Core of deep learning: gradient descent algorithm
X '(next value) = x-rate (step) * x' (reciprocal of x)
The derived gradient drops are Adam, sgd, rmsprop, nag, adadelta, adagrad and momentum
Approximate solution of Closed Form Solution
Logistic Regression compression function, compressed to 0-1
Linear Regression
Differences between Python and python data types

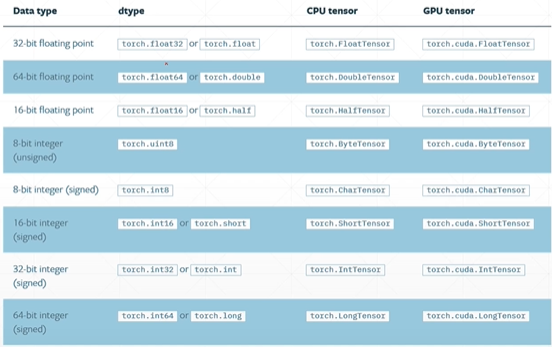
a=torch.randn(2,3) print(a.type())#You can view specific data types #The output is' torch FloatTensor' print(type(a))#View basic data types, not commonly used #torch.Tensor print(isinstance(a,torch.FloatTensor))#Matching data type #The output is True #The same Tensor deployed on GPU and CPU is different `` ### Dimension0/rank0 (scalar) torch.tensor(1.) #Output is tensor (1.) torch.tensor(1.3) #Output tensor (1.300) #Can be used to express loss
In pytoch, vectors are collectively referred to as tensors,
Dim0, scalar
Dim1: Bias Linear Input
Dim2:Linear Input batch
Dim3:RNN input Batch
Dim4:CNN:[b,c,h,w]
tensor: input ready-made data
FloatTensor input dimension (not commonly used)
list is not recommended
Path import of dataset
import os
from torch.utils.data import Dataset
from PIL import Image
class MyData(Dataset):
def __init__(self, root_dir, label_dir):
self.root_dir = root_dir
self.label_dir = label_dir
self.path = os.path.join(self.root_dir, self.label_dir)
self.img_path = os.listdir(self.path)
def __getitem__(self, idx):
img_name = self.img_path[idx]
img_item_path = os.path.join(self.root_dir, img_name)
img = Image.open(img_item_path)
label = self.label_dir
return img, label
def __len__(self): # length
return len(self.img_path)
root_dir = "dataset/train"
ants_label_dir = "ants"
bees_label_dir = "bees"
ants_dataset = MyData(root_dir, ants_label_dir)
bees_dataset = MyData(root_dir, bees_label_dir)
train_dataset = ants_dataset + bees_dataset # Data set splicing. Sometimes the data is not enough, multiple similar data sets can be spliced
Use of TensorBoard (one data)
The tensor data type is required to display, so format conversion is required before use
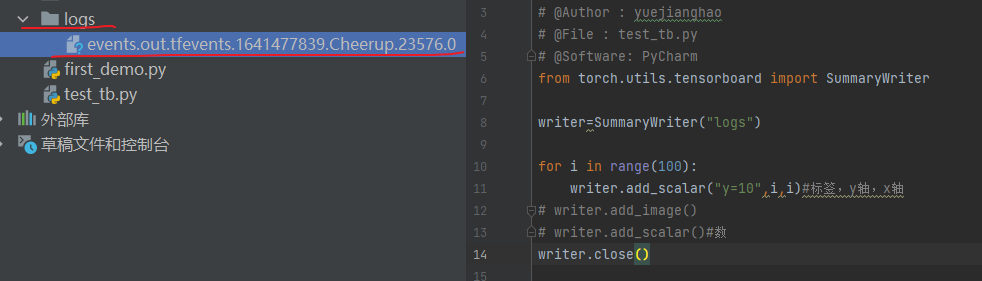
from torch.utils.tensorboard import SummaryWriter
writer=SummaryWriter("logs")
for i in range(100):
writer.add_scalar("y=x",i,i)#Label, y-axis, x-axis
# writer.add_image()
# writer.add_scalar()#number
writer.close()
Opening method:
Enter at the terminal:
tensorboard --logdir=logs
When multiple people use it, the port may be occupied. Modify the port as follows
tensorboard --logdir=logs --port=6007
from torch.utils.tensorboard import SummaryWriter
import numpy as np
from PIL import Image
writer = SummaryWriter("logs")
image_path = "dataset/train/ants/0013035.jpg"
img_PIL = Image.open(image_path)
img_array = np.array(img_PIL) # Convert to np type to match writer add_ Input parameters for image()
print(type(img_array))
print(img_array.shape)#It is known from (512, 768, 3) that the channel is behind, so other functions are required to convert it
writer.add_image("test",img_array,1,dataformats='HWC')#Display the picture and convert the format. Convert the format to HWC and put the channel behind. In this way, you can see the output results of each step
for i in range(100):
writer.add_scalar("y=10", i, i) # Label, y-axis, x-axis
writer.close()
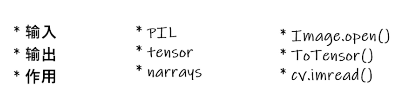
Transform to transform the picture
import cv2
from PIL import Image
from torch.utils.tensorboard import SummaryWriter
from torchvision import transforms
# Usage of python - data type of tensor
# Through transform To tensor, look at two questions
# 1. How to use transform (Python)
# 2. Why do I need Tensor data types
# Relative path is required because it is a diagonal bar and absolute path is a backslash
img_path = "dataset/train/ants/0013035.jpg"
img = Image.open(img_path)
writer=SummaryWriter("logs")
# 1. How to use transform (Python)
tensor_trans = transforms.ToTensor()
tensor_img = tensor_trans(img)
#Introducing pictures using cv2
cv_img=cv2.imread(img_path)
writer.add_image("Tensor_img",tensor_img)
writer.close()
from PIL import Image
from torch.utils.tensorboard import SummaryWriter
from torchvision import transforms
writer = SummaryWriter("logs")
img = Image.open("dataset/train/ants/0013035.jpg")
print(img)
# ToTensor
trans_totensor = transforms.ToTensor() # Assign this method to trans_totensor
img_tensor = trans_totensor(img) # The result is then assigned to img after using this method_ tensor
writer.add_image("Totensor", img_tensor) # Then it is displayed on write
# Normalize normalization
print(img_tensor[0][0][0])
trans_norm = transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5]) # Because RGB is three-layer, three standard deviations need to be provided
img_norm = trans_norm(img_tensor)
print(img_norm[0][0][0])
writer.add_image("Normalize", img_norm)
#Resize
print(img.size)
trans_resize=transforms.Resize((512,512))
img_resize=trans_resize(img)
print(img_resize)
#Compose - resize -2
trans_resize_2=transforms.Resize(512)
#PIL-PIL->tensor
trans_compose=transforms([trans_resize_2,trans_totensor])
img_resize_2=trans_compose(img)
writer.add_image("Resize",img_resize_2,1)#The following 1 shows the output in the first place
#RandomCrop
trans_random=transforms.RandomCrop(512)
trans_compose_2=transforms.Compose([trans_random,trans_totensor])#The front represents random clipping, and the back is converted to tensor data type
for i in range(10):
img_crop=trans_compose_2(img)
writer.add_image("RandonCrop",img_crop,i)
writer.close()
Summary of some methods:
- First, pay attention to the input / output and type, and what parameters are required (you can view them in print or official documents)
- Read more official documents
torchvision uniformly manages and processes data sets
import ssl
import torchvision
from torch.utils.tensorboard import SummaryWriter
dataset_transform=torchvision.transforms.Compose([torchvision.transforms.ToTensor()])
ssl._create_default_https_context = ssl._create_unverified_context
train_set=torchvision.datasets.CIFAR10(root="./dataset",train=True,transform=dataset_transform,download=True)#It will be in/ dataset creates a file and saves the data
test_set=torchvision.datasets.CIFAR10(root="./dataset",train=False,transform=dataset_transform,download=True)
# print(test_set[0])
# print(test_set.classes)
# img,target=test_set[0]
# print(img)
writer=SummaryWriter("p10")
for i in range(10):
img,target=test_set[i]
writer.add_image("test_set",img,i)
writer.close()
dataload (load partial data from dataset)
import torchvision
# Prepared test data set
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
test_data = torchvision.datasets.CIFAR10("./dataset", train=False, transform=torchvision.transforms.ToTensor())
test_loader = DataLoader(dataset=test_data, batch_size=64, shuffle=True, num_workers=0, drop_last=False)#The following is set to false, which means that when it is less than 64, it will not be rounded off
# The first sample and target in the test data set
img, target = test_data[0]
print(img.shape)
print(target)
writer = SummaryWriter("dataloader")
step = 0
for epoch in range(2):#Verify whether the two grabs are the same
# Random grab
for data in test_loader:
imgs, targets = data
# print(imgs.shape)
# print(targets)
writer.add_images("Epoch:{}".format(epoch), imgs, step)
step = step + 1
writer.close()
nn.Module neural network basic skeleton
import torch
from torch import nn
class Tudui(nn.Module):
def __init__(self):
super().__init__()
def forward(self,input):#Forward output
output=input+1
return output
tudui=Tudui()
x=torch.tensor(1.0)
output=tudui(x)
print(output)
debugging
First run the corresponding py, then debug, mainly use F7, debug to see, pay attention to the choice of breakpoints.
Convolution use
torch.nn is equivalent to torch nn. Function is encapsulated. If you need to know more, you can understand function.
Input image: 5x5
| 1 | 2 | 0 | 3 | 1 |
|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 1 |
| 1 | 2 | 1 | 0 | 0 |
| 5 | 2 | 3 | 1 | 1 |
| 2 | 1 | 0 | 1 | 1 |
Convolution kernel 3x3
| 1 | 2 | 1 |
|---|---|---|
| 0 | 1 | 0 |
| 2 | 1 | 0 |
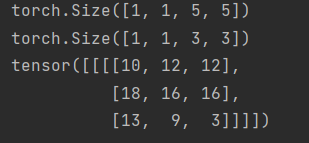
The result is:
| 10 | 12 | 12 |
|---|---|---|
| 18 | 16 | 16 |
| 13 | 9 | 3 |
The input image is multiplied and added corresponding to the convolution kernel (Strive=1)
import torch
import torch.nn.functional as F
input = torch.tensor([[1, 2, 0, 3, 1], [0, 1, 2, 3, 1],
[1, 2, 1, 0, 0], [5, 2, 3, 1, 1],
[2, 1, 0, 1, 1]])
kernel = torch.tensor([[1, 2, 1],
[0, 1, 0],
[2, 1, 0]])
#Format conversion
input = torch.reshape(input, (1, 1, 5, 5)) # size is 1,5x5
kernel = torch.reshape(kernel, (1, 1, 3, 3))
print(input.shape)
print(kernel.shape) # Check the size and know that there are only height and width. If it does not meet the requirement of 4 arrays, it needs to be transformed
output = F.conv2d(input, kernel, stride=1)#Two dimensional convolution
print(output)
padding=1: fill a grid
| 1 | 2 | 0 | 3 | 1 | ||
| 0 | 1 | 2 | 3 | 1 | ||
| 1 | 2 | 1 | 0 | 0 | ||
| 5 | 2 | 3 | 1 | 1 | ||
| 2 | 1 | 0 | 1 | 1 | ||
out_channels=2 means two channels. Use two convolution kernels to compare the same input image, get two arrays, and then output the results. In fact, many algorithms are increasing the number of channels
Pooling
maxpool maximization is also called downsampling
maxunpool maximization is also called upsampling
Interpretation – a parameter that controls the stripe of elements in the window void convolution, which is different from ordinary convolution and has gaps
ceil_mode – when True, will use ceil instead of floor to compute the output shape
Usage of cell, round up (i.e. keep)

Maximum pooling (maximum output)
Input image:
| 1 | 2 | 0 | 3 | 1 |
|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 1 |
| 1 | 2 | 1 | 0 | 0 |
| 5 | 2 | 3 | 1 | 1 |
| 2 | 1 | 0 | 1 | 1 |
Pooled core (3x3),kernel_size=3
Ceil_model=True
The output result is
| 2 | 3 |
|---|---|
| 5 | 1 |
Ceil_model=false
The output is 2
Maximum pooling function: retain the maximum characteristics of input and reduce the amount of data
In many networks, after one layer of convolution, another layer of pooling, and then nonlinear activation
Nonlinear activation function

inplace is the difference between occupied and unoccupied
Nonlinear transformation mainly introduces some nonlinear characteristics. The more nonlinearity, the better. It conforms to various curves or models with various characteristics
Regularization
Function: it can speed up training
import torch
import torchvision
from torch import nn
from torch.nn import Linear
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader=DataLoader(dataset,batch_size=64)
class Yjh(nn.Module):
def __init__(self):
super().__init__()
self.linear1=Linear(196608,10)
def forward(self,input):
output=self.linear1(input)
return output
yjh=Yjh()
for data in dataloader:
imgs,targets=data
output=torch.reshape(imgs,(1,1,1,-1))
print(output.shape)
output=yjh(output)
print(output.shape)
The output result is:
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 196608])
torch.Size([1, 1, 1, 10])
torch.Size([1, 1, 1, 49152])
..........................
..........................
It is obvious that the amount of data is greatly reduced
Turn data into a row
import torch
import torchvision
from torch import nn
from torch.nn import Linear
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader=DataLoader(dataset,batch_size=64)
class Yjh(nn.Module):
def __init__(self):
super().__init__()
self.linear1=Linear(196608,10)
def forward(self,input):
output=self.linear1(input)
return output
yjh=Yjh()
for data in dataloader:
imgs,targets=data
output=torch.flatten(imgs)
print(output.shape)
output=yjh(output)
print(output.shape)
# Output as
torch.Size([196608])
torch.Size([10])
torch.Size([196608])
torch.Size([10])
torch.Size([196608])
torch.Size([10])
torch.Size([196608])
torch.Size([10])
torch.Size([196608])
torch.Size([10])
torch.Size([196608])
torch.Size([10])
................
...............
Sequential use
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
class Yjh(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = Conv2d(3, 32, 5, 1, padding=2)
self.maxpool1 = MaxPool2d(2)
self.conv2 = Conv2d(32, 32, 5, 1, padding=2)
self.maxpool2 = MaxPool2d(2)
self.conv3 = Conv2d(32, 64, 5, padding=2)
self.maxpool3 = MaxPool2d(2)
self.flatten = Flatten()
self.linear1 = Linear(1024, 64)#If you don't know the first parameter, Flatten it with the Flatten function
self.linear2 = Linear(64, 10)
def forward(self, x):
x = self.conv1(x)
x = self.maxpool1(x)
x = self.conv2(x)
x = self.maxpool2(x)
x = self.conv3(x)
x = self.maxpool3(x)
x = self.flatten(x)
x = self.linear1(x)
x = self.linear2(x)
return x
yjh = Yjh()
print(yjh)
input = torch.ones((64, 3, 32, 32))
output = yjh(input)
print(output.shape)
Output results:
(conv1): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2)) (maxpool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (conv2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2)) (maxpool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (conv3): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2)) (maxpool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (flatten): Flatten(start_dim=1, end_dim=-1) (linear1): Linear(in_features=1024, out_features=64, bias=True) (linear2): Linear(in_features=64, out_features=10, bias=True) ) torch.Size([64, 10])
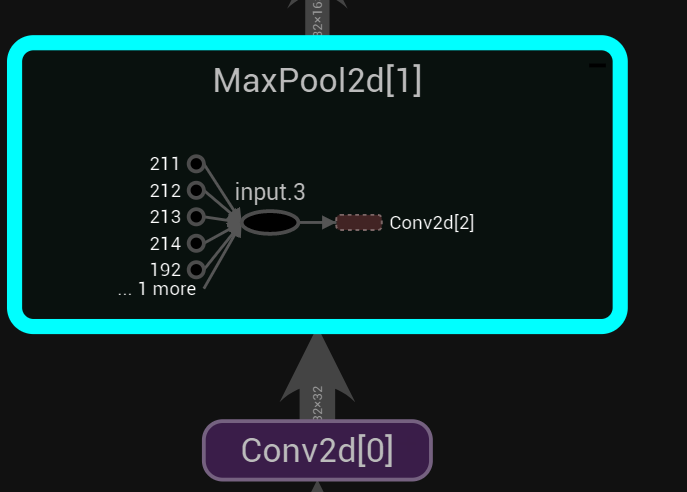
Sequential
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.tensorboard import SummaryWriter
class Yjh(nn.Module):
def __init__(self):
super().__init__()
self.model1=Sequential(
Conv2d(3, 32, 5, 1, padding=2),#Note that it needs to be separated by commas
MaxPool2d(2),
Conv2d(32, 32, 5, 1, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x=self.model1(x)
return x
yjh = Yjh()
print(yjh)
input = torch.ones((64, 3, 32, 32))
output = yjh(input)
print(output.shape)
writer=SummaryWriter("./logs_seq")
writer.add_graph(yjh,input)#Output chart
writer.close()
Output results:
Yjh(
(model1): Sequential(
#The serial number is in front
(0): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=1024, out_features=64, bias=True)
(8): Linear(in_features=64, out_features=10, bias=True)
)
)
torch.Size([64, 10])
tensorboard displays the results

Double click to open

Loss function loss
- calculation error
- Back propagation, optimization parameters
import torch from torch import nn from torch.nn import L1Loss input = torch.tensor([1, 2, 3], dtype=torch.float32) targets = torch.tensor([1, 2, 5], dtype=torch.float32) inputs = torch.reshape(input, (1, 1, 1, 3)) # batch_size,1channel,1 row, 3 columns targets = torch.reshape(targets, (1, 1, 1, 3), ) loss = L1Loss()#The default is average, which can be sum result = loss(inputs, targets) print(result)#|((1-1)+(1-1)+(5-3))/3|=0.667 loss = L1Loss(reduction="sum") result = loss(inputs, targets) print(result) loss_mes=nn.MSELoss()#Square difference result_mse=loss_mes(inputs,targets) print(result_mse)#(0+0+2)**2/3 x=torch.tensor([0.1,0.2,0.3]) y=torch.tensor([1]) x=torch.reshape(x,(1,3))#batch_ Size = class 1,3 loss_cross=nn.CrossEntropyLoss()#Cross entropy result_cross=loss_cross(x,y)#loss(x,class)=-0.2+ln(exp(0.1)+exp(0.2)+exp(0.3)) print(result_cross)
Output results:
tensor(0.6667) tensor(2.) tensor(1.3333) tensor(1.1019)
Calculation formula of cross entropy( Detailed explanation of calculation process)

import torchvision
from torch import nn
from torch.nn import Linear, Flatten, MaxPool2d, Conv2d, Sequential
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor())
dataloader=DataLoader(dataset,batch_size=64,shuffle=True)
class Yjh(nn.Module):
def __init__(self):
super().__init__()
self.model1=Sequential(
Conv2d(3, 32, 5, 1, padding=2),#Note that it needs to be separated by commas
MaxPool2d(2),
Conv2d(32, 32, 5, 1, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x=self.model1(x)
return x
loss=nn.CrossEntropyLoss()
yjh=Yjh()
for data in dataloader:
imgs,targets=data
outputs=yjh(imgs)
result_loss=loss(outputs,targets)
print(result_loss)
Output results:
The following number is the error between the output of the neural network and the real output
tensor(2.3062, grad_fn=<NllLossBackward0>) tensor(2.2851, grad_fn=<NllLossBackward0>) tensor(2.2950, grad_fn=<NllLossBackward0>) tensor(2.3109, grad_fn=<NllLossBackward0>) tensor(2.3065, grad_fn=<NllLossBackward0>) tensor(2.3187, grad_fn=<NllLossBackward0>) tensor(2.3177, grad_fn=<NllLossBackward0>) tensor(2.3050, grad_fn=<NllLossBackward0>) tensor(2.2990, grad_fn=<NllLossBackward0>) tensor(2.3180, grad_fn=<NllLossBackward0>) tensor(2.2940, grad_fn=<NllLossBackward0>) tensor(2.3002, grad_fn=<NllLossBackward0>) tensor(2.2984, grad_fn=<NllLossBackward0>)
optimizer
After debugging, click YJH / protected attributes/_ modules/model1//Protected Attributes/_ grad under modules /'0 '/ weight is the gradient
import torch
import torchvision
from torch import nn
from torch.nn import Linear, Flatten, MaxPool2d, Conv2d, Sequential
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10("./dataset", train=False, transform=torchvision.transforms.ToTensor())
dataloader = DataLoader(dataset, batch_size=64, shuffle=True)
class Yjh(nn.Module):
def __init__(self):
super().__init__()
self.model1 = Sequential(
Conv2d(3, 32, 5, 1, padding=2), # Note that it needs to be separated by commas
MaxPool2d(2),
Conv2d(32, 32, 5, 1, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss()
yjh = Yjh()
optim = torch.optim.SGD(yjh.parameters(), lr=0.01) # Don't set the learning rate too high
for epoch in range(20):#Learn all 20 times, usually hundreds or thousands
running_loss=0.0
for data in dataloader:
imgs, targets = data
outputs = yjh(imgs)
result_loss = loss(outputs, targets)
optim.zero_grad() # Gradient clearing
result_loss.backward()
optim.step()
running_loss=running_loss+result_loss
print(running_loss)#Overall error
Output results:
tensor(360.1394, grad_fn=<AddBackward0>) tensor(354.0514, grad_fn=<AddBackward0>) tensor(330.8956, grad_fn=<AddBackward0>) tensor(314.3040, grad_fn=<AddBackward0>) tensor(303.5132, grad_fn=<AddBackward0>) tensor(295.3024, grad_fn=<AddBackward0>) tensor(287.8922, grad_fn=<AddBackward0>) tensor(279.0746, grad_fn=<AddBackward0>) tensor(273.7878, grad_fn=<AddBackward0>) tensor(267.6326, grad_fn=<AddBackward0>) tensor(261.7827, grad_fn=<AddBackward0>) tensor(256.1693, grad_fn=<AddBackward0>) tensor(251.1363, grad_fn=<AddBackward0>) tensor(247.0008, grad_fn=<AddBackward0>) tensor(242.6788, grad_fn=<AddBackward0>) tensor(238.7857, grad_fn=<AddBackward0>) tensor(234.5486, grad_fn=<AddBackward0>) tensor(231.1932, grad_fn=<AddBackward0>) tensor(227.9656, grad_fn=<AddBackward0>) tensor(224.6279, grad_fn=<AddBackward0>)
VGG model
Generally, it is used as a network in front, and then other network models are added later
View network structure
import torchvision
from torch import nn
vgg16_false=torchvision.models.vgg16(pretrained=False)#Untrained = false is untrained, and progress displays the progress bar
vgg16_true=torchvision.models.vgg16(pretrained=True)#Progress displays the progress bar
print(vgg16_false)
train_data=torchvision.datasets.CIFAR10('./dataset',train=True,transform=torchvision.transforms.ToTensor())
vgg16_true.classifier.add_module('add_linear',nn.Linear(1000,10))#The linear model can be added to the sequential of the classifier
print(vgg16_true)
vgg16_false.classifier[6]=nn.Linear(4096,10)#Change the output from 1000 to 10
Output results:
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
(add_linear): Linear(in_features=1000, out_features=10, bias=True)
)
)
Model saving
import torch import torchvision.models vgg16 = torchvision.models.vgg16(pretrained=False) # Save method 1 is best saved as pth, which not only saves the network model structure, but also saves the parameters torch.save(vgg16, "vgg16_methd1.pth") # Save method 2 saves the parameters in the network model in the form of Dictionary (official recommendation), with small space torch.save(vgg16.state_dict(), 'vgg16_methd2.pth')
Model loading
import torch
#Loading method corresponding to saving method 1
import torchvision.models
model=torch.load("vgg16_methd1.pth")#If you use your own network model, you need to redefine the class when loading
print(model)
#Loading method corresponding to saving method 2
#Restore network model structure
vgg16=torchvision.models.vgg16(pretrained=False)
vgg16.load_state_dict("vgg16_methd2.pth")
# model2=torch.load("vgg16_methd1.pth")
print(vgg16)
Complete model training routine
import torch
import torchvision
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from model import * # Import everything from another file
# Prepare training set
train_data = torchvision.datasets.CIFAR10("./dataset", train=True, download=True,
transform=torchvision.transforms.ToTensor())
test_data = torchvision.datasets.CIFAR10("./dataset", train=False, transform=torchvision.transforms.ToTensor(),
download=True)
# length
train_data_size = len(train_data)
test_data_size = len(test_data)
print("The length of the training set is:{}".format(train_data_size))
print("The length of the test set is:{}".format(test_data_size))
# Load training set
train_dataloader = DataLoader(train_data, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)
# Create network model
yjh = Yjh()
# loss function
loss_fn = nn.CrossEntropyLoss()
# optimizer
learning_rate = 1e-2 # I'm used to extracting this parameter
optimizer = torch.optim.SGD(yjh.parameters(), lr=learning_rate, ) # gradient descent
# Set some parameters of the training network
total_train_step = 0 # Record the number of workouts
total_test_step = 0 # Record the number of tests
epoch = 10 # Number of rounds of training
# Add tensorboard
writer = SummaryWriter("./logs_train_1")
for i in range(epoch):
print("-----The first{}Round of training begins-----".format(i + 1))
yjh.train()#Set the network to training mode and work on specific layers
for data in train_dataloader:
imgs, targets = data
output = yjh(imgs)
loss = loss_fn(output, targets)
# Optimizer optimization model
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_train_step += 1
if total_train_step % 100 == 0:
print("Training times:{},Loss={}".format(total_train_step, loss.item())) # Finally, adding item () will directly output a number. Finally, it can also be written directly as loss
writer.add_scalar("train_loss", loss.item(), total_train_step)
# testing procedure
yjh.eval()#Set the network to authentication mode to work on a specific layer
total_accuracy=0#Overall accuracy
total_test_loss = 0 # Calculate the error of the entire data set
with torch.no_grad():#No gradient is set, and there is no need to change the gradient
for data in test_dataloader:
imgs, targets = data
outputs = yjh(imgs)
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
accuracy=(outputs.argmax(1)==targets).sum()
total_accuracy=total_accuracy+accuracy
print("On the overall test set Loss:{}".format(total_test_loss))
print("Accuracy on the overall test set:{}".format(total_accuracy/test_data_size))
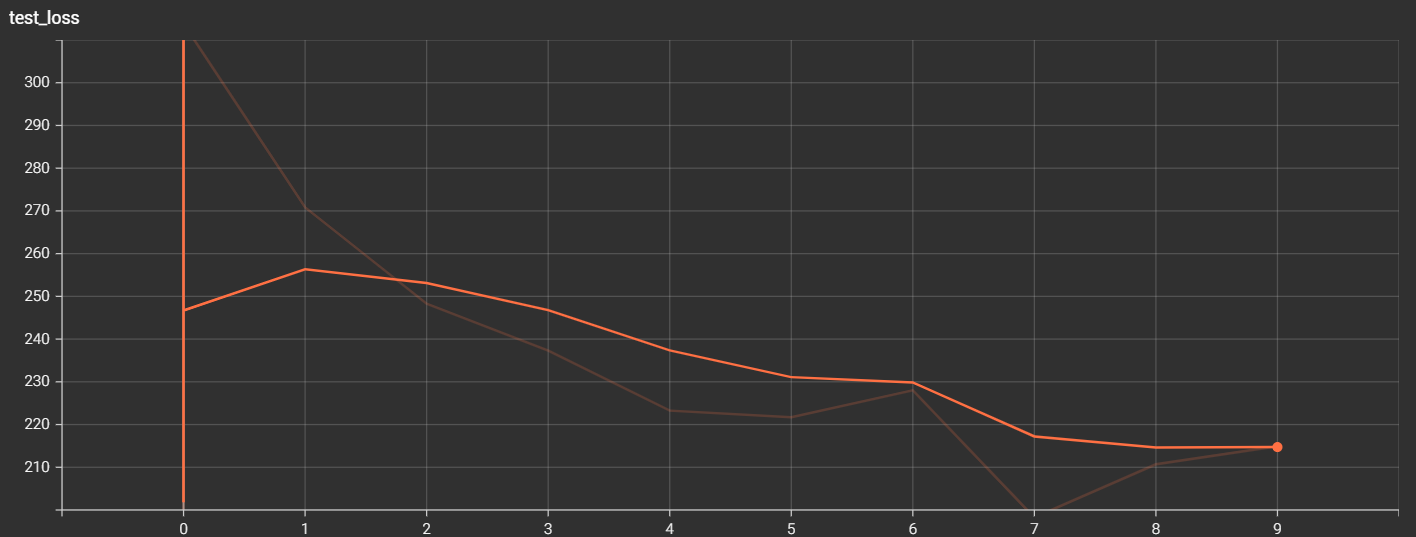
writer.add_scalar("test_loss", total_test_loss, total_test_step)
writer.add_scalar("Test accuracy",total_accuracy/test_data_size,total_test_step)
total_test_step += 1
#Save model
torch.save(yjh,"yjh_{}.pth".format(i))#Save several rounds of training model
#torch.save(yjh.state_dict(),"yjh_{}.pth".farmat(1))#Official recommendation
print("Model saved")
writer.close()
The model is placed separately py
import torch
from torch import nn
from model import *
class Yjh(nn.Module):
def __init__(self) -> None:
super().__init__()
self.model = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=32, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(1024, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
if __name__ == '__main__':
yjh = Yjh()
input = torch.ones((64, 3, 32, 32))
output = yjh(input)
print(output.shape)
Output results:
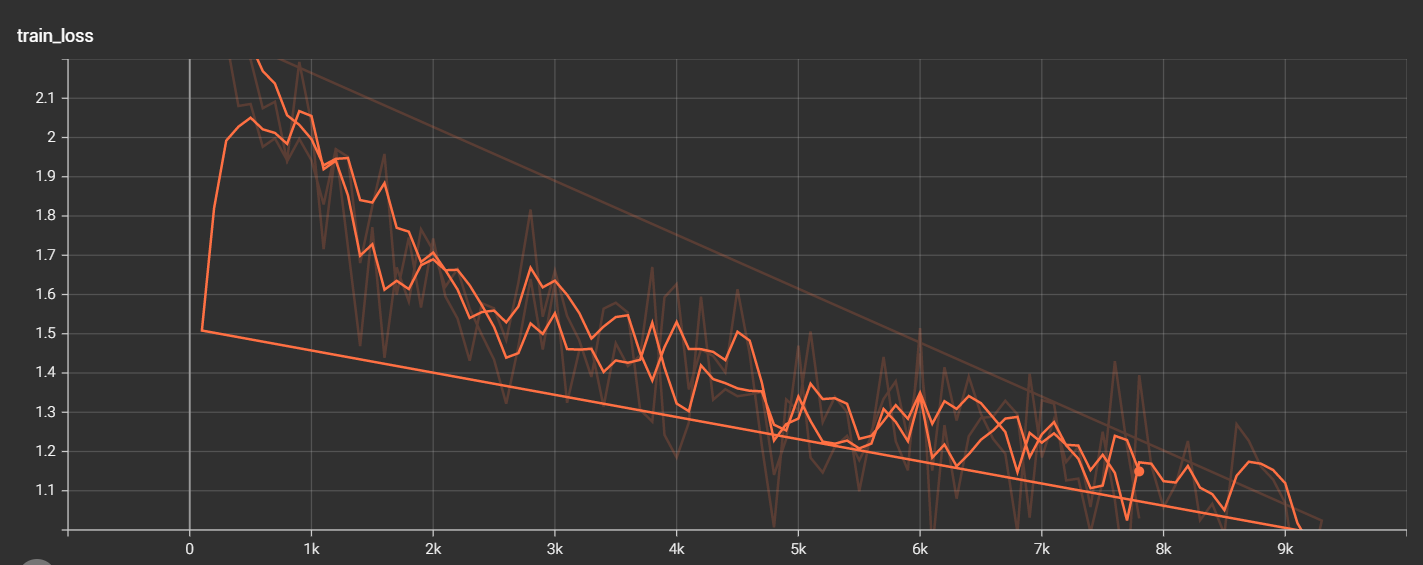
Note: the irregular descent curve is the correct output
It can be seen from the above figure that the more model training, the lower the loss of the model
Accuracy judgment of model
2xinput
Model(2 classification)
output=[0.1,0.2] [0.3,0.4]
Get the maximum probability through Argmax, i.e. Preds=[1] [1]
input target=[0] [1]
Preds==inputs target
[false,true].sum()=1
Code implementation:
import torch outputs = torch.tensor([[0.1, 0.2], [0.3, 0.4]]) print(outputs.argmax(1))#If the value is 1, the horizontal ratio is compared, such as 0.1 and 0.2, and if the value is 0, the vertical ratio is compared, such as 0.1 and 0.3 preds=outputs.argmax(1) targets=torch.tensor([0,1]) print((preds==targets).sum())
Output results:
tensor([1, 1]) tensor(1)
GPU training (much faster than CPU)
-
Method 1: realize the following four conditions
-
network model
yjh = Yjh() if torch.cuda.is_available(): yjh=yjh.cuda()#Transfer the network model to cuda -
Data (input, output)
imgs, targets = data if torch.cuda.is_available(): imgs=imgs.cuda() targets=targets.cuda() -
loss function
# loss function loss_fn = nn.CrossEntropyLoss() if torch.cuda.is_available():#Determine whether the GPU is available loss_fn=loss_fn.cuda() -
.cuda()
-
Time taken for 400 times under GPU training:
The time for training 200 is:9.526910781860352 Training times: 200,Loss=2.2695932388305664 The time of training 400 is:11.822770833969116 Training times: 400,Loss=2.1631038188934326
Time spent training 400 times without GPU
The time for training 200 is:12.44710397720337 Training times: 200,Loss=2.2931666374206543 The time of training 400 is:24.154792308807373 Training times: 400,Loss=2.231562852859497
If there is no hardware GPU, you can use Google's collab to create a new notebook, and then set GPU acceleration in the notebook settings in the file, which can be used for free 30 hours a week (very fast)
-
Mode 2: it is easy to change the configuration uniformly
-
First define a device: device = torch device(“cuda”)
If there are multiple, you can also specify a graphics card torch device(“cuda:1”)
-
Similar to mode 1, in Used at cuda() to(device)
as
if torch.cuda.is_available():#Determine whether the GPU is available loss_fn=loss_fn.to(device)
-
Model validation
By adding breakpoints when adding data sets and checking the classification index after debug ging, you can get the following pictures

import torch
import torchvision.transforms
from PIL import Image
from torch import nn
image_path = "./imgs/img_1.png"
image = Image.open(image_path)
image = image.convert("RGB") # Because png is four channel, it needs to be changed to three channel
transform = torchvision.transforms.Compose([torchvision.transforms.Resize((32, 32)), torchvision.transforms.ToTensor()])
image = transform(image)
print(image.shape)
# Create network model
class Yjh(nn.Module):
def __init__(self) -> None:
super().__init__()
self.model = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=32, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2),
nn.Conv2d(32, 32, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(1024, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
model = torch.load("yjh_0.pth", map_location=torch.device("cpu")) # Pay attention to how the model trained on GPU runs when loading
print(model)
image=torch.reshape(image, (1, 3, 32, 32))
model.eval()
with torch.no_grad(): # Available without gradient, save memory and improve performance
output = model(image)
print(output)
print(output.argmax(1))
Output is:
tensor([[ 1.2021, 0.4194, 0.0154, -0.8249, -0.9728, -0.7813, -1.5403, -0.3458,
1.6731, 1.2716]])
tensor([8])
The result is not correct, because the model has only undergone one round of training
model = torch.load("yjh_49.pth", map_location=torch.device("cpu")) # When loading the model trained on GPU, pay attention to how to run it. Load the model trained 50 times
The output result is
tensor([[ 3.7672, -25.3946, 7.4116, 10.2170, 1.1890, 11.3926, 7.7192,
-0.6535, -4.2947, -10.5369]])
tensor([5])
The result is correct

stay Introduction to pytorch video In the middle school, the small mound has achieved nanny level teaching, and many important places have repeatedly mentioned that the teaching content and methods are not boring. Compared with other pytorch introductory videos I have seen, the video of the small mound has really achieved introductory teaching, rather than persuading the teaching. If you follow the small mound step by step, you will find it more and more interesting, with complete content and reasonable arrangement, The front row recommends students who want to learn pytorch to watch. In case of errors, small mounds will patiently find and teach how to find and solve errors. In the process of learning pytorch, they have also learned a lot of other knowledge. Why not! In their own practice, there is an error that the teacher does not appear. Don't worry. Baidu can easily solve it!