Hash concept
A one-to-one mapping relationship can be established between the storage location of an element and its key through a function (hashFunc), so the element can be found quickly during search
The conversion function used in the hash method is called hash (hash) function, and the structure constructed is called hash table (or Hash list)
Mapping mode
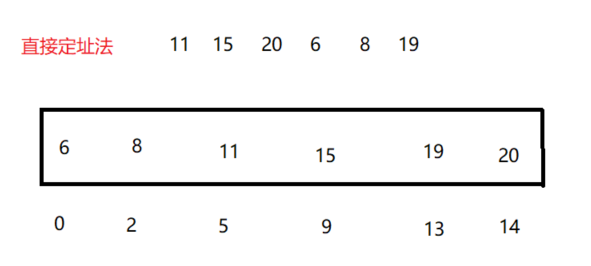
① Direct addressing method
The index relationship is established by the relative mapping or absolute position between the array and the data. At this time, the time complexity of adding, deleting, checking and modifying is O (1)
Defects:
1. If the data range is large, the direct customization method will waste a lot of space
2. Cannot process string, floating point number and other data, and cannot be used as the index of the array
Applicable to: integers and data sets
② Division residue method
Solve the problem of large data range
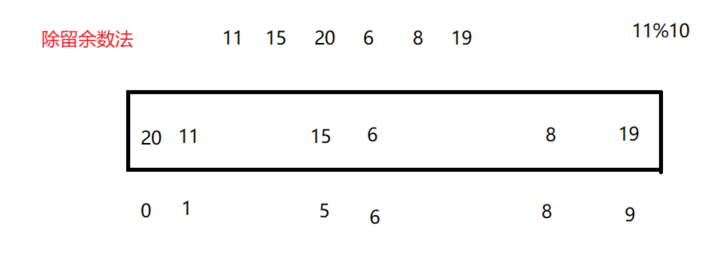
However, there is hash conflict in the divide and remainder method (different keywords calculate the same hash address through the same hash hash number, which is called hash conflict or hash collision)
Resolve hash conflicts
1. Closed hash (open addressing method)
① Linear detection

Linear detection can lead to a stampede effect (continuous position conflicts)
② Secondary detection

Secondary detection is more dispersed than linear detection data, which can effectively alleviate the stampede effect
Load factor (load factor) = number of valid data stored / space size
The larger the load factor, the higher the probability of conflict, the lower the efficiency of adding, deleting, searching and modifying, and the higher the space utilization
The smaller the load factor, the lower the probability of conflict, the higher the efficiency of adding, deleting, searching and modifying, and the lower the space utilization
Therefore, an important problem of hash table is to control the size of load factor
③ Node design
In order to determine whether a position in the array is empty, we use State to identify the State of the data in the array
//Three states of data are listed
enum State
{
EMPTY,//empty
EXITS,//existence
DELETE,//When deleting, you only need to change the status to DELETE, so as to realize "false" deletion
};
template<class K,class V>
struct HashData
{
//Each data node is stored in the vector
//kv structure
pair<K, V> _kv;
State _state = EMPTY;
};
④ Find operation
When the search is empty, it is not found. We control the size of the load factor to be less than 0.8, so there must be an empty location
HashData<K,V>* Find(const K& key)
{
//Judge whether it is empty
if (_table.size() == 0)
{
return nullptr;
}
HashFunc hf;
size_t start = hf(key) % _table.size();
size_t index = start;
size_t i = 1;
while (_table[index].state != EMPTY)
{
//eureka
if (_table[index]._state==EXITS && _table[index]._kv.first == key)
{
return &_table[index];
}
//Look back
//Linear detection secondary detection only needs to be changed to index=start+i*i;
index =start+ i;
index %= _table.size();
++i;
}
return nullptr;
}
⑤ Insert operation
The insertion operation needs to pay attention to the problem of capacity expansion. After capacity expansion, the data must be remapped
bool Insert(const pair<K, V>& kv)
{
//Judge whether it exists
HashData<K,V>* ret = Find(kv.first);
if (ret)
{
return false;
}
//size==0
if (_table.size() == 0)
{
_table.resize(10);
}
//Calculate load factor
else if ((double)_n/(double)_table.size()>0.8)
{
//After capacity expansion, all data must be remapped into the new array
//Recreate the HashTable object and reuse its insert function
HashTable<K, V,HashFunc> newHashTable;
newHashTable.resize(2 * _table.size());
//Traverse the data of the original Table
for (auto& e : _table)
{
if (e._state == EXITS)
{
//Reuse Insert
newHashTable.Insert(e._kv);
}
}
_table.swap(newHashTable._table);
}
HashFunc hf;
//If accessing data larger than size < capacity
size_t start = hf(kv.first) % _table.size();
size_t index = start;
size_t i = 1;
//Linear detection or secondary detection
while (_table[index]._state == EXITS)
{
index += start+i;
index %= _table.size();
++i;
}
_table[index]._kv = kv;
_table[index]._state = EXITS;
++_n;
}
⑥ Delete operation
Once found, you only need to modify the status
bool Erase(const K& key)
{
//lookup
HashData<K, V>* ret = Find(key);
if (ret == nullptr)
{
return false;
}
else
{
//Modify node status
ret->_state = DELETE;
--_n;
return true;
}
}
Complete code
#pragma once
#include<vector>
#include<iostream>
using namespace std;
//closeHash
namespace tzc
{
enum State
{
EMPTY,
EXITS,
DELETE,
};
template<class K,class V>
struct HashData
{
pair<K, V> _kv;
State _state = EMPTY;
};
template<class K>
struct HashFunc
{
int operator()(int i)
{
return i;
}
};
template<>
struct HashFunc<string>
{
size_t operator()(const string& s)
{
//return s[0];
size_t value = 0;
for (auto ch : s)
{
value += ch;
value *= 131;
}
return value;
}
};
struct pairHashFunc
{
size_t operator()(const pair<string, string>& kv)
{
size_t value = 0;
//Take KEY as the standard
for (auto& ch : kv.first)
{
value += ch;
value *= 131;
}
return value;
}
};
template<class K, class V,class HashFunc>
class HashTable
{
public:
bool Insert(const pair<K, V>& kv)
{
//Judge whether it exists
HashData<K,V>* ret = Find(kv.first);
if (ret)
{
return false;
}
//size==0
if (_table.size() == 0)
{
_table.resize(10);
}
//Calculate load factor
else if ((double)_n/(double)_table.size()>0.8)
{
//After capacity expansion, all data must be remapped into the new array
//Recreate the HashTable object and reuse its insert function
HashTable<K, V,HashFunc> newHashTable;
newHashTable.resize(2 * _table.size());
for (auto& e : _table)
{
if (e._state == EXITS)
{
//Multiplex insertion
newHashTable.Insert(e._kv);
}
}
_table.swap(newHashTable._table);
}
HashFunc hf;
size_t start = hf(kv.first) % _table.size();//table[]
size_t index = start;
size_t i = 1;
//Linear detection or secondary detection
while (_table[index]._state == EXITS)
{
index += start+i;
index %= _table.size();
++i;
}
_table[index]._kv = kv;
_table[index]._state = EXITS;
++_n;
}
HashData<K,V>* Find(const K& key)
{
//Judge whether it is empty
if (_table.size() == 0)
{
return nullptr;
}
HashFunc hf;
size_t start = hf(key) % _table.size();
size_t index = start;
size_t i = 1;
while (_table[index].state != EMPTY)
{
//eureka
if (_table[index]._state==EXITS && _table[index]._kv.first == key)
{
return &_table[index];
}
//Look back
//Linear detection secondary detection only needs to be changed to index=start+i*i;
index =start+ i;
index %= _table.size();
++i;
}
return nullptr;
}
bool Erase(const K& key)
{
HashData<K, V>* ret = Find(key);
if (ret == nullptr)
{
return false;
}
else
{
ret->_state = DELETE;
--_n;
return true;
}
}
private:
vector<HashData<K,V>> _table;
size_t _n;//The number of data stored in the array
};
}
Problems with hash
For the following statements:
size_t start = hf(kv.first) % _table.size();
When the key stores string, user-defined type and other data, it cannot be converted into a mapping relationship and stored in the hash table
At this time, you need to implement the corresponding imitation function to convert the key module
template<class K>
struct HashFunc
{
int operator()(int i)
{
return i;
}
};
//template specialization
template<>
struct HashFunc<string>
{
size_t operator()(const string& s)
{
//return s[0];
size_t value = 0;
for (auto ch : s)
{
value += ch;
value *= 131;
}
return value;
}


It can be seen that if a type is used as a map/set key, it needs to be able to support size comparison
Do unordered_ map/unordered_ The key of set needs to be able to be converted into shaping (supporting modulo) and can be compared to equality
2. Hash
Hashing – hash bucket / zipper method
A single linked table pointer that stores a structure in an array

① Node design
Node stored in vector
template<class K,class V>
struct HashNode
{
pair<K, V> _kv;
HashNode<K, V>* _kv;
HashNode(const pair<K, V>& kv)
:_next(__nullptr)
,_kv(kv)
{
}
};
Private members contained in HashTable
vector<Node*> _table; size_t _n = 0;//Number of valid data
② Insert operation
Capacity increase: it is agreed that when the load factor is equal to 1, it is necessary to increase capacity and reorganize, traverse the nodes in the old table and insert them into the new table
Hash table reorganization method 1: cleverly reuse the insert method
bool Insert(const pair<K.V>& kv)
{
if (Find(kv.first))
{
return false;
}
if (_n == _table.size())
{
//Open up a new vector
vector<Node*> newtable;
size_t newSize = _table.size() == 0 ? 11: _table.size() * 2;
newtable.resize(GetNextPrime(_table.size()), nullptr);
//Traverse old tables
for (size_t i = 0; i < _table.size(); ++i)
{
if (_table[i])
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->_next;
size_t index = cur->_kv.first % newtable.size();
//Head insertion
cur->_next = _table[index];
_table[index] = cur;
cur = next;
}
_table[i] = nullptr;
}
}
//Old and new exchange
_table.swap(newtable);
}
HashFunc fc;
size_t index = fc(kv.first) % _table.size();
Node* newnode = new Node(kv);
//Head insert
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return true;
}
Hash table reorganization method 2: the reorganization is realized by continuously inserting the head node of the old bucket node into the new corresponding vector
bool Insert(const pair<K.V>& kv)
{
if (Find(kv.first))
{
return false;
}
if (_n == _table.size())
{
vector<Node*> newtable(sizeof(_table.size()),(Node*)0);
//Traverse old nodes
for(size_t i=0;i<_table.size();i++)
{
Node* cur=_table[i];
while(cur)
{
//Find out which bucket the node is in
HashFunc fc;
size_t cur_bucket= fc(cur.first) % _table.size();
//Four step delicate operation
//1. Take the next node of cur to the head of the bucket
_table[i]=cur->next;
//2,3: insert the cur node into the new vector by head interpolation
cur->next=newtable[cur_bucket];
newtable[cur_bucket]=cur;
//4.cur becomes the head of the old barrel again
cur=_table[i];
}
}
_table.swap(newtable);
}
HashFunc fc;
size_t index = fc(kv.first) % _table.size();
Node* newnode = new Node(kv);
//Head insert
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return true;
}
③ Find operation
Node* Find(const K& key)
{
if (_table.size() == 0)
{
return false;
}
HashFunc fc;
size_t index = fc(key) % _table.size();
Node* cur = _table[index];
while(cur)
{
if (cur->_kv.first == key)
{
return cur;
}
else
{
cur = cur->_next;
}
}
return nullptr;
}
④ Delete operation
bool Erase(const K& key)
{
HashFunc fc;
size_t index = fc(key) % _table.size();
Node* prev = nullptr;
Node* cur = _table[index];
while (cur)
{
if (cur->_kv.first == key)
{
//The header node is deleted
if (_table[index] == cur)
{
_table[index] = cur->_next;
}
else
{
prev->_next = cur->_next;
}
--_n;
delete cur;
return true;
}
prev = cur;
cur = cur->_next;
}
}
Advantages of hash bucket:
1. High space utilization
2. Extreme situations (all conflicts) and Solutions
Resolution of hash bucket conflict
If the data is concentrated on several buckets at this time, the time complexity will be very large when searching and deleting, which may be equal to O (N)
1. Therefore, the load factor can be controlled
The load factor of open hash may be greater than 1, so the control load factor is generally [0,1]
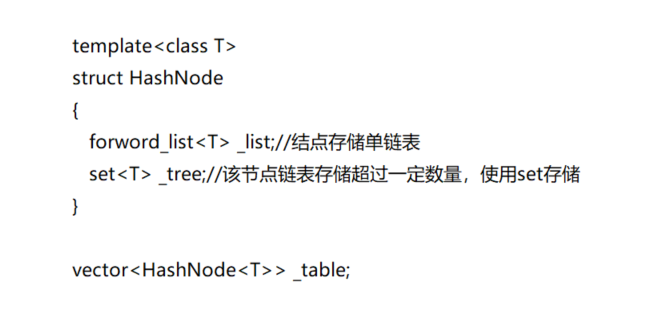
2. Secondly, when there are few data, the load factor is very low, but most of the data conflict
The bucket with more data can be used to change its data structure into a red black tree
Design of bucket size:
Try to make the size of the table prime, so it is less likely to conflict
const int PRIMECOUNT = 28;
const size_t primeList[PRIMECOUNT] ={
53ul, 97ul, 193ul, 389ul, 769ul, 1543ul, 3079ul, 6151ul, 12289ul,
24593ul, 49157ul, 98317ul, 196613ul, 393241ul, 786433ul, 1572869ul, 3145739ul,
6291469ul,12582917ul, 25165843ul, 50331653ul, 100663319ul, 201326611ul, 402653189ul, 805306457ul, 1610612741ul, 3221225473ul, 4294967291ul};
size_t GetNextPrime(size_t prime)
{
size_t i = 0;
for(; i < PRIMECOUNT; ++i)
{
if(primeList[i] > primeList[i])
return primeList[i];
}
return primeList[i];
}
encapsulation
① Iterator
In addition to passing the current node pointer, the iterator should also pass in the hash table
Because + + cannot find the position of the next bucket when the iterator reaches the end node of a bucket
At this time, the hash table is passed in and the position of the next bucket is recalculated
// forward declaration // Default parameters are only given when defining
template<class K, class T, class KeyOfT, class HashFunc>
class HashTable;
// iterator
template<class K, class T, class KeyOfT, class HashFunc = Hash<K>>
struct __HTIterator
{
typedef HashNode<T> Node;
typedef __HTIterator<K, T, KeyOfT, HashFunc> Self;
typedef HashTable<K, T, KeyOfT, HashFunc> HT;
Node* _node;
HT* _pht;
//Hash table passed to iterator
__HTIterator(Node* node, HT* pht)
:_node(node)
, _pht(pht)
{}
Self& operator++()
{
// 1. Traverse the nodes of each bucket one by one
if (_node->_next)
{
_node = _node->_next;
}
//To the next bucket
else
{
//size_t index = HashFunc()(KeyOfT()(_node->_data)) % _pht->_table.size();
KeyOfT kot;
HashFunc hf;
size_t index = hf(kot(_node->_data)) % _pht->_table.size();
++index;
while (index < _pht->_table.size())
{
if (_pht->_table[index])
{
//_ You need Shen Mingyuan for pht to access private members
_node = _pht->_table[index];
return *this;
}
//Empty bucket
else
{
++index;
}
}
_node = nullptr;
}
return *this;
}
//The underlying implementation uses a one-way linked list without overloading--
T& operator*()
{
return _node->_data;
}
T* operator->()
{
return &_node->_data;
}
bool operator != (const Self& s) const
{
return _node != s._node;
}
bool operator == (const Self& s) const
{
return _node == s.node;
}
};
②hash functions
hash fuctions is an imitation function to solve the problem of modulo of stored values
① char,int, long, etc. are integer types and return values directly
② Strings and built-in types can only be returned after special operations
And the returned value should consider the hash conflict
//Convert Key to realize modular operation
template<class K>
struct Hash
{
size_t operator()(const K& key)
{
return key;
}
};
// Specialization string
template<>
struct Hash < string >
{
size_t operator()(const string& s)
{
// BKDR Hash
size_t value = 0;
for (auto ch : s)
{
value += ch;
value *= 131;
}
return value;
}
};
③ Hash table
//Node storage T
template<class T>
struct HashNode
{
HashNode<T>* _next;
T _data;
HashNode(const T& data)
:_next(nullptr)
, _data(data)
{}
};
template<class K, class T, class KeyOfT, class HashFunc = Hash<K>>
class HashTable
{
typedef HashNode<T> Node;
template<class K, class T, class KeyOfT, class HashFunc>
friend struct __HTIterator;//Class template parameter friend
public:
typedef __HTIterator<K, T, KeyOfT, HashFunc> iterator;
HashTable() = default; // Displays the default construction for the specified build
//Deep copy
HashTable(const HashTable& ht)
{
_n = ht._n;
_table.resize(ht._table.size());
for (size_t i = 0; i < ht._table.size(); i++)
{
Node* cur = ht._table[i];
while (cur)
{
Node* copy = new Node(cur->_data);
// Traversal insertion
copy->_next = _table[i];
_table[i] = copy;
cur = cur->_next;
}
}
}
HashTable& operator=(HashTable ht)
{
_table.swap(ht._table);
swap(_n, ht._n);
return *this;
}
~HashTable()
{
for (size_t i = 0; i < _table.size(); ++i)
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->_next;
delete cur;
cur = next;
}
_table[i] = nullptr;
}
}
//Calculate the number of barrels in the table
size_t bucket_count()const
{
return _table.size();
}
iterator begin()
{
size_t i = 0;
while (i < _table.size())
{
if (_table[i])
{
return iterator(_table[i], this);
}
++i;
}
return end();
}
iterator end()
{
return iterator(nullptr, this);
}
size_t GetNextPrime(size_t prime)
{
const int PRIMECOUNT = 28;
static const size_t primeList[PRIMECOUNT] =
{
53ul, 97ul, 193ul, 389ul, 769ul,
1543ul, 3079ul, 6151ul, 12289ul, 24593ul,
49157ul, 98317ul, 196613ul, 393241ul, 786433ul,
1572869ul, 3145739ul, 6291469ul, 12582917ul, 25165843ul,
50331653ul, 100663319ul, 201326611ul, 402653189ul, 805306457ul,
1610612741ul, 3221225473ul, 4294967291ul
};
size_t i = 0;
for (; i < PRIMECOUNT; ++i)
{
if (primeList[i] > prime)
return primeList[i];
}
return primeList[i];
}
//Calculate the maximum number of barrels
size_t maxbucket_count()const
{
return primeList[PRIMECOUNT-1];
}
//Hash bucket implementation
pair<iterator, bool> Insert(const T& data)
{
KeyOfT kot;
// eureka
auto ret = Find(kot(data));
if (ret != end())
return make_pair(ret, false);
HashFunc hf;
// When the load factor reaches 1, increase the capacity
if (_n == _table.size())
{
vector<Node*> newtable;
//size_t newSize = _table.size() == 0 ? 8 : _table.size() * 2;
//newtable.resize(newSize, nullptr);
newtable.resize(GetNextPrime(_table.size()));
// Traverse the nodes in the old table and map them to the new table
for (size_t i = 0; i < _table.size(); ++i)
{
if (_table[i])
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->_next;
size_t index = hf(kot(cur->_data)) % newtable.size();
// Head insert
cur->_next = newtable[index];
newtable[index] = cur;
cur = next;
}
_table[i] = nullptr;
}
}
_table.swap(newtable);
}
size_t index = hf(kot(data)) % _table.size();
Node* newnode = new Node(data);
// Head insert
newnode->_next = _table[index];
_table[index] = newnode;
++_n;
return make_pair(iterator(newnode, this), true);
}
iterator Find(const K& key)
{
if (_table.size() == 0)
{
return end();
}
KeyOfT kot;//Get key
HashFunc hf;//Transform key module
size_t index = hf(key) % _table.size();
Node* cur = _table[index];
while (cur)
{
if (kot(cur->_data) == key)
{
return iterator(cur, this);
}
else
{
cur = cur->_next;
}
}
return end();
}
bool Erase(const K& key)
{
size_t index = hf(key) % _table.size();
Node* prev = nullptr;
Node* cur = _table[index];
while (cur)
{
if (kot(cur->_data) == key)
{
if (_table[index] == cur)
{
_table[index] = cur->_next;
}
else
{
prev->_next = cur->_next;
}
--_n;
delete cur;
return true;
}
prev = cur;
cur = cur->_next;
}
return false;
}
private:
vector<Node*> _table;
size_t _n = 0; // Number of valid data
};
UnorderedSet
Using set is convenient to find elements quickly
The set with red black tree at the bottom has the function of automatic sorting (medium order traversal), while the unordered set with hash table at the bottom does not
namespace tzc
{
template<class K>
class unordered_set
{
//Get key
struct SetKeyOfT
{
const K& operator()(const K& k)
{
return k;
}
};
public:
typedef typename OpenHash::HashTable<K, K, SetKeyOfT >::iterator iterator;
iterator begin()
{
return _ht.begin();
}
iterator end()
{
return _ht.end();
}
pair<iterator, bool> insert(const K k)
{
return _ht.Insert(k);
}
private:
OpenHash::HashTable<K, K, SetKeyOfT> _ht;//Hash table implemented by open hash
};
}
UnorderedMap
namespace tzc
{
template<class K, class V>
class unordered_map
{
//Get Key
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename OpenHash::HashTable<K, pair<K, V>, MapKeyOfT>::iterator iterator;
iterator begin()
{
return _ht.begin();
}
iterator end()
{
return _ht.end();
}
pair<iterator, bool> insert(const pair<K, V>& kv)
{
return _ht.Insert(kv);
}
V& operator[](const K& key)//Overload []
{
pair<iterator, bool> ret = _ht.Insert(make_pair(key, V()));
return ret.first->second;
}
private:
OpenHash::HashTable<K, pair<K, V>, MapKeyOfT> _ht;
};
}