Normalized opencv template after pit matching
Direct code
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(){
///Single template matching
//Mat temp = imread("D://jy7188//cppProject//image//23//huge_eye.png"); // Template image
Mat temp = imread("D://jy7188//cppProject//image//23//temp.png "); / / template image
Mat src = imread("D://jy7188//cppProject//image//23//huge.png "); / / image to be searched
imshow("temp", temp);
imshow("src", src);
Mat dst = src.clone(); //Original image backup
int width = src.cols - temp.cols +1; //result width
int height = src.rows - temp.rows +1; //result height
Mat result(height, width, CV_32FC1); //Create result mapping image
matchTemplate(src, temp, result, TM_CCOEFF_NORMED); //The best matching value of correlation coefficient is 1
imshow("result", result);
for (int row = 0; row < result.rows; row++)
{
for (int col = 0; col < result.cols; col++)
{
result.at<float>(row, col) = 0.5*(result.at<float>(row, col) + 1);//Reassign pixel values
}
}
//normalize(result, result, 1, 0, NORM_L1, -1, Mat());
imshow("normalize", result);
double minValue, maxValue;
Point minLoc, maxLoc;
minMaxLoc(result, &minValue, &maxValue, &minLoc, &maxLoc);
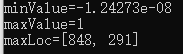
cout << "minValue=" << minValue << endl;
cout << "maxValue=" << maxValue << endl;
cout << "maxLoc=" << maxLoc << endl;
if (maxValue < 0.95) {
cout << "Mismatch" << endl;
}
char matchRate[10];
sprintf_s(matchRate, "%0.2f", maxValue);
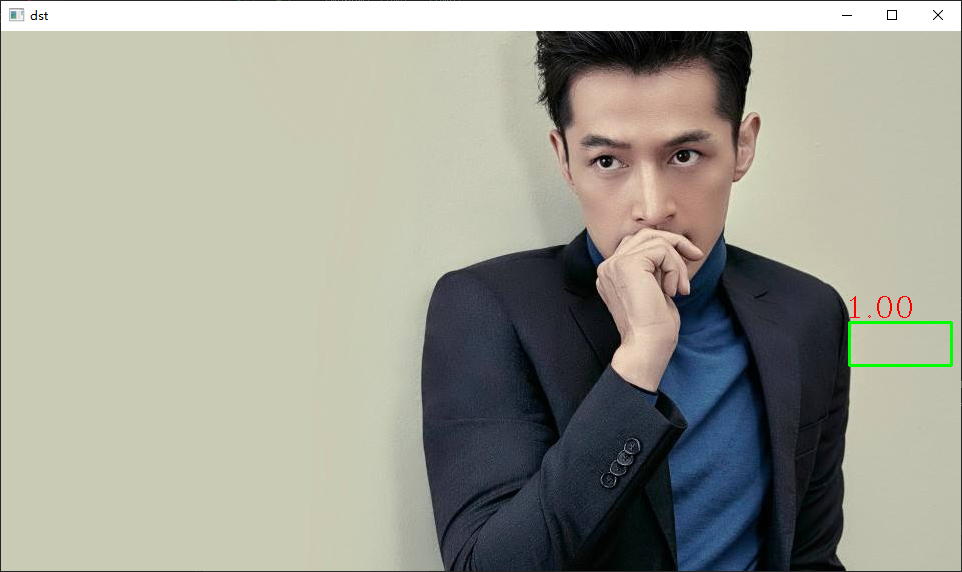
putText(dst, matchRate, Point(maxLoc.x - 5, maxLoc.y - 5), FONT_HERSHEY_COMPLEX, 1, Scalar(0, 0, 255), 1);
rectangle(dst, maxLoc, Point(maxLoc.x + temp.cols, maxLoc.y + temp.rows), Scalar(0, 255, 0), 2, 8);
imshow("dst", dst);
waitKey(0);
}
If the template is indeed a part of the original image, the maxValue is 1 whether normalization is performed or not. However, if we perform normalization, when our template is not intercepted from the original image, but does not match any position of the original image, we use normalize to normalize it, We can find this by comparing the result images before and after normalization
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat()); //Normalized to 0 -- 1 range
Before normalization
After normalization
result
So should we use normalization? We can refer to the following blog first
https://blog.csdn.net/kuweicai/article/details/78988886
https://blog.csdn.net/cosmispower/article/details/64457406?utm_source=copy
- NORM_MINMAX, normalized to (min,max)
- NORM_INF: L ∞ norm of normalized array (Chebyshev distance) (maximum of absolute value)
- NORM_L1: normalized array (Manhattan distance) L1 norm (sum of absolute values)
- NORM_L2: normalized array (Euclidean distance) L2 norm
In my opinion, normalization should not be used if there is wrong matching, because we know that the output image result of the template search result must be a single channel 32-bit floating-point image, and the maximum value is 1. In this way, we can get the image similarity with the highest similarity with the template through minMaxvalue, and set the required confidence interval. For example, if you think that 95% similarity is achieved, you can set maxvalue > 0.95 to determine that the matching is successful.
If you really want to normalize the range, we can normalize the result by ourselves and map the value of [- 1,1] to [0,1]. The formula is for reference https://blog.csdn.net/Touch_Dream/article/details/62076236
The method is as follows
for (int row = 0; row < result.rows; row++)
{
for (int col = 0; col < result.cols; col++)
{
result.at<float>(row, col) = 0.5*(result.at<float>(row, col) + 1);//Reassign pixel values
}
}
At this time, the maximum value will not be 1, but the ratio to the interval [- 1, 1].
result

Ratio of interval [- 1, 1].
result
[external chain picture transferring... (img-cyd1cu9v-164552287546)]
[external chain picture transferring... (IMG mtjfgy3j-164552287547)]