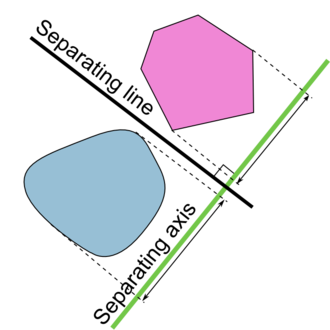
Collision detection can be divided into Broad Phase (Rough inspection) and Narrow Phase (fine detection) two stages. In the rough detection stage, we can directly compare whether the AABB bounding boxes of two objects collide, so as to save computation and time. In fine detection, SAT (separating axis theory) collision detection algorithm is intuitive and efficient, and its principle is clear and easy to understand, that is, if two objects do not collide, there will always be a straight line that can separate the two objects. The separation axis is applicable to the detection between convex polygons, not concave polygons. For the detection of concave polygons, the concave polygons can be divided into multiple convex polygons by algorithm and then calculated.
The algorithm steps are as follows:
Step 1: take out an edge from the polygon to be detected and find its normal vector, which will be our "projection axis".
Step 2: loop through each point of the first polygon and project them onto this axis.
Step 3: do the same for the second polygon.
Step 4: get the projections of the two polygons respectively, and detect whether the two projections overlap.
If you find a gap between the two "shadows" projected on the axis, the two figures must not intersect. But if there is no gap, they may touch. You need to continue to detect until each edge of the two polygons is detected. If you don't find any gaps after detecting each edge, they collide with each other.
According to the above steps, the key codes for collision detection between two convex polygons are as follows (refer to collision.py):
1 def flatten_points_on(points, normal, result): 2 minpoint = math.inf 3 maxpoint = -math.inf 4 5 for i in range(len(points)): 6 dot = points[i].dot(normal) 7 if dot < minpoint: 8 minpoint = dot 9 if dot > maxpoint: 10 maxpoint = dot 11 12 result[0] = minpoint 13 result[1] = maxpoint 14 15 16 def is_separating_axis(a_pos, b_pos, a_points, b_points, axis): 17 range_a = [0, 0] 18 range_b = [0, 0] 19 20 offset_v = b_pos-a_pos 21 22 projected_offset = offset_v.dot(axis) 23 24 flatten_points_on(a_points, axis, range_a) 25 flatten_points_on(b_points, axis, range_b) 26 27 range_b[0] += projected_offset 28 range_b[1] += projected_offset 29 30 if range_a[0] > range_b[1] or range_b[0] > range_a[1]: 31 return True 32 33 return False 34 35 36 def test_aabb(b1,b2): 37 return b1[0][0] <= b2[1][0] and b2[0][0] <= b1[1][0] and b1[0][1] <= b2[2][1] and b2[0][1] <= b1[2][1] 38 39 40 def test_poly_poly(a, b): 41 a_points = a.rel_points 42 b_points = b.rel_points 43 a_pos = a.pos 44 b_pos = b.pos 45 46 for n in a.normals: 47 if is_separating_axis(a_pos, b_pos, a_points, b_points, n): 48 return False 49 50 for n in b.normals: 51 if is_separating_axis(a_pos, b_pos, a_points, b_points, n): 52 return False 53 54 return True 55 56 57 def collide(a, b): 58 if not test_aabb(a.aabb, b.aabb): 59 return False 60 61 return test_poly_poly(a, b)
For the two convex polygons specified by the parameter, the collision detection function collide first calls test_aabb to determine whether their AABB bounding boxes intersect. If the outer bounding boxes do not intersect, it proves that there is no collision between the two polygons, and the function value returns False. On the contrary, the separation axis algorithm is used for fine detection. The function test_poly_poly follows the algorithm flow For each edge, if there is a separation axis on one edge so that the projections of two polygons on it do not coincide, it proves that the polygons do not intersect and returns False directly. The function is_separating_axis calculates whether the projections of polygons on the separation axis vector coincide according to the given positions of two polygons, the local coordinates of polygon vertices and the separation axis vector.
It should be noted that for many graphic views and animation frames, the graphic item is generally drawn using its own local coordinate system, usually with its center as the origin, and the position of the graphic item is the position of its origin in its parent graphic item or scene. The Coordinate Datum in the separation axis judgment function should be consistent, if the position of the first input parameter polygon $a $is used as the reference At the origin, the local coordinates of the vertex coordinates of polygon $b $under this reference system should be added with the offset of $\ overrightarrow {AB} $, so the offset after the projection of polygon $b $to the separation axis should also be added with the offset after the projection of $\ overrightarrow {AB} $$ \ overrightarrow{ab} \cdot \overrightarrow{n}$
reference resources:
Explanation of separation axis theorem algorithm for collision detection