 Rimeng Society
Rimeng Society
AI AI:Keras PyTorch MXNet TensorFlow PaddlePaddle deep learning real combat (irregular update)
CNN: RCNN,SPPNet,Fast RCNN,Faster RCNN,YOLO V1 V2 V3,SSD,FCN,SegNet,U-Net,DeepLab V1 V2 V3,Mask RCNN
Single target tracking SiamMask: specific target vehicle tracking part1
Single target tracking SiamMask: specific target vehicle tracking part2
Single target tracking: tracking effect
Single target tracking: data set processing
Single target tracking: model building
Single target tracking: model training
Single target tracking: model testing
1.6 test
Learning objectives:
- Understand the process of network testing
- It can realize network training code writing
The network test is mainly in tools test Py. The contents contained in this file are shown in the following figure:
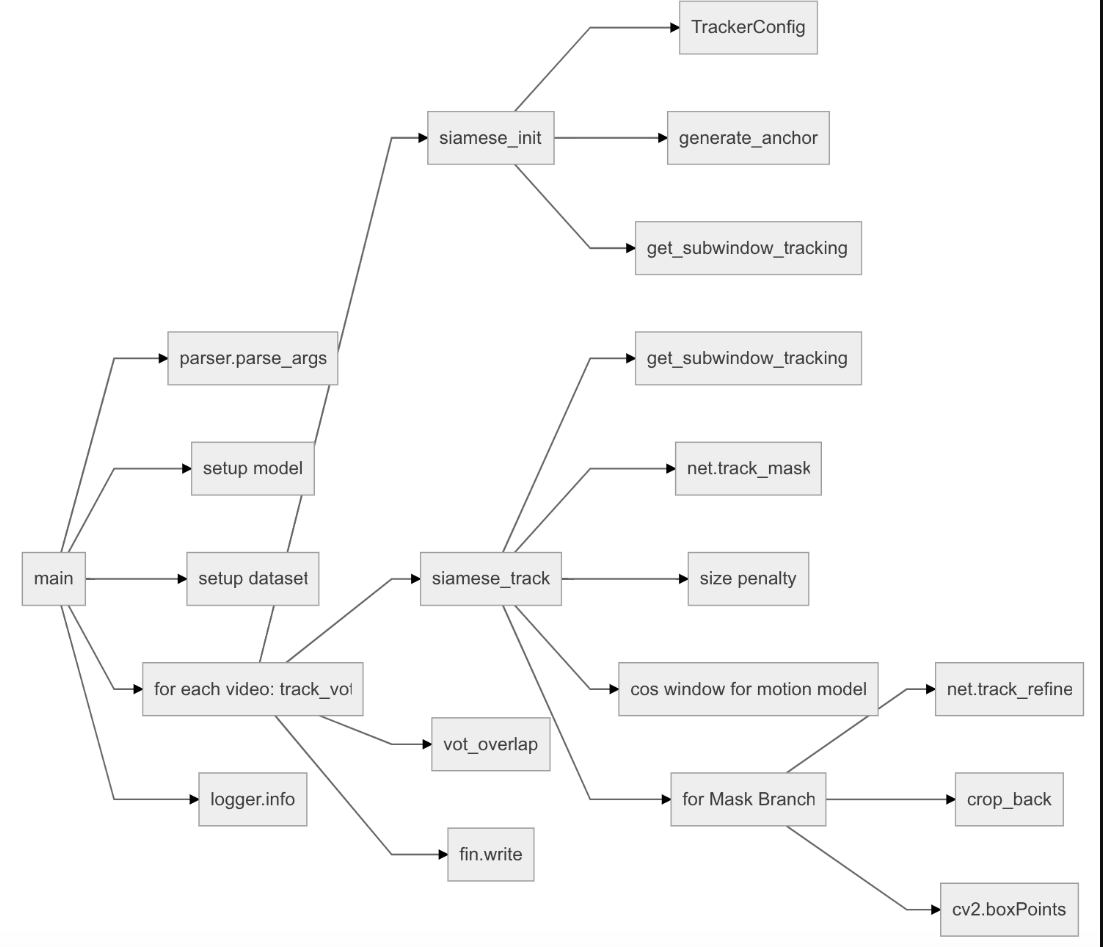
Next, we will introduce the above contents.
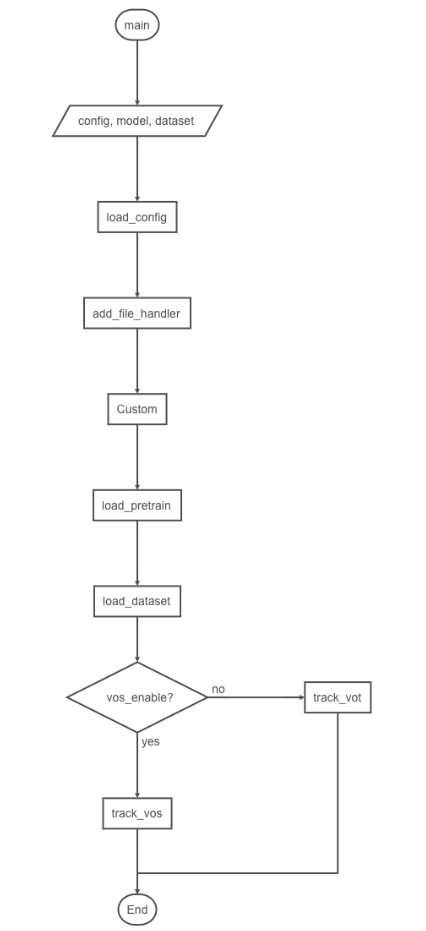
1.main
main function is the program entry for network training. Its execution process is to read configuration information - > set log output to log file - > load network model - > load weight file - > load data - > track. During tracking, it is also necessary to judge whether target segmentation is carried out, as shown in the following figure:
The implementation code is as follows:
def main():
# Get command line parameter information
global args, logger, v_id
args = parser.parse_args()
# Get the configuration information in the configuration file: mainly including network structure, super parameters, etc
cfg = load_config(args)
# Initialize the logxi information and input the log information into the disk file
init_log('global', logging.INFO)
if args.log != "":
add_file_handler('global', args.log, logging.INFO)
# Enter the relevant configuration information into the log file
logger = logging.getLogger('global')
logger.info(args)
# setup model
# Load network model schema
if args.arch == 'Custom':
from custom import Custom
model = Custom(anchors=cfg['anchors'])
else:
parser.error('invalid architecture: {}'.format(args.arch))
# Load network model parameters
if args.resume:
assert isfile(args.resume), '{} is not a valid file'.format(args.resume)
model = load_pretrain(model, args.resume)
# Use evaluation mode to activate drop, etc
model.eval()
# Hardware information
device = torch.device('cuda' if (torch.cuda.is_available() and not args.cpu) else 'cpu')
model = model.to(device)
# Load dataset setup dataset
dataset = load_dataset(args.dataset)
# These three data support mask VOS or VOT?
if args.dataset in ['DAVIS2016', 'DAVIS2017', 'ytb_vos'] and args.mask:
vos_enable = True # enable Mask output
else:
vos_enable = False
total_lost = 0 # VOT
iou_lists = [] # VOS
speed_list = []
# Process data
for v_id, video in enumerate(dataset.keys(), start=1):
if args.video != '' and video != args.video:
continue
# Call track with true_ vos
if vos_enable:
# If the test data is ['davis2017 ','ytb_vos'], multi-target tracking will be enabled
iou_list, speed = track_vos(model, dataset[video], cfg['hp'] if 'hp' in cfg.keys() else None,
args.mask, args.refine, args.dataset in ['DAVIS2017', 'ytb_vos'], device=device)
iou_lists.append(iou_list)
# False call track_vot
else:
lost, speed = track_vot(model, dataset[video], cfg['hp'] if 'hp' in cfg.keys() else None,
args.mask, args.refine, device=device)
total_lost += lost
speed_list.append(speed)
# report final result
if vos_enable:
for thr, iou in zip(thrs, np.mean(np.concatenate(iou_lists), axis=0)):
logger.info('Segmentation Threshold {:.2f} mIoU: {:.3f}'.format(thr, iou))
else:
logger.info('Total Lost: {:d}'.format(total_lost))
logger.info('Mean Speed: {:.2f} FPS'.format(np.mean(speed_list)))3.get_subwindow_tracking
This function obtains the image window of the tracking target and adjusts the target frame. If the target frame is outside the image, expand the image and modify the coordinates of the target frame. The code is as follows:
def get_subwindow_tracking(im, pos, model_sz, original_sz, avg_chans, out_mode='torch'):
"""
Get tracking target information(Image window)
:param im:Tracked template image
:param pos:Target location
:param model_sz:Target dimensions required by the model
:param original_sz: Expanded target size
:param avg_chans:Average of images
:param out_mode: Output mode
:return:
"""
if isinstance(pos, float):
# Target center point coordinates
pos = [pos, pos]
# Target size
sz = original_sz
# Image size
im_sz = im.shape
# Distance from boundary to center after expanding background
c = (original_sz + 1) / 2
# Judge whether the target exceeds the image boundary. If it exceeds the boundary, fill the image
context_xmin = round(pos[0] - c)
context_xmax = context_xmin + sz - 1
context_ymin = round(pos[1] - c)
context_ymax = context_ymin + sz - 1
left_pad = int(max(0., -context_xmin))
top_pad = int(max(0., -context_ymin))
right_pad = int(max(0., context_xmax - im_sz[1] + 1))
bottom_pad = int(max(0., context_ymax - im_sz[0] + 1))
# Image filling changes the origin of the image and calculates the coordinates of the filled image block
context_xmin = context_xmin + left_pad
context_xmax = context_xmax + left_pad
context_ymin = context_ymin + top_pad
context_ymax = context_ymax + top_pad
# zzp: a more easy speed version
r, c, k = im.shape
# In case of filling, the target position needs to be re assigned
if any([top_pad, bottom_pad, left_pad, right_pad]):
# Generate an all zero array of the same size as the filled image
te_im = np.zeros((r + top_pad + bottom_pad, c + left_pad + right_pad, k), np.uint8)
# Assign a value to the original image area
te_im[top_pad:top_pad + r, left_pad:left_pad + c, :] = im
# Assign the filled area to the mean value of the image
if top_pad:
te_im[0:top_pad, left_pad:left_pad + c, :] = avg_chans
if bottom_pad:
te_im[r + top_pad:, left_pad:left_pad + c, :] = avg_chans
if left_pad:
te_im[:, 0:left_pad, :] = avg_chans
if right_pad:
te_im[:, c + left_pad:, :] = avg_chans
# Modify the location of the target based on the fill results
im_patch_original = te_im[int(context_ymin):int(context_ymax + 1), int(context_xmin):int(context_xmax + 1), :]
else:
im_patch_original = im[int(context_ymin):int(context_ymax + 1), int(context_xmin):int(context_xmax + 1), :]
# If the size of the tracking target block is different from the model input size, the image size is modified by opencv
if not np.array_equal(model_sz, original_sz):
im_patch = cv2.resize(im_patch_original, (model_sz, model_sz))
else:
im_patch = im_patch_original
# cv2.imshow('crop', im_patch)
# cv2.waitKey(0)
# If the output mode is Torch, switch its channels; otherwise, output im directly_ patch
return im_to_torch(im_patch) if out_mode in 'torch' else im_patch4.generate_anchor
This method generates the anchor of the target, uses the anchor to track the target, and modifies the coordinates of the anchor.

The code is as follows:
def generate_anchor(cfg, score_size):
"""
Generate anchor: anchor
:param cfg: anchor Configuration information for
:param score_size:Scoring results of classification
:return:Generated anchor
"""
# Initialize anchor
anchors = Anchors(cfg)
# Get generated anchors
anchor = anchors.anchors
# Get the upper left and lower right coordinates of each anchor
x1, y1, x2, y2 = anchor[:, 0], anchor[:, 1], anchor[:, 2], anchor[:, 3]
# Convert anchor to the form of center point coordinates and width and height
anchor = np.stack([(x1+x2)*0.5, (y1+y2)*0.5, x2-x1, y2-y1], 1)
# Gets the scope of the generated anchor
total_stride = anchors.stride
# Get the number of anchors
anchor_num = anchor.shape[0]
# The anchor group is broadcast and its coordinates are set.
anchor = np.tile(anchor, score_size * score_size).reshape((-1, 4))
# After adding ori offset, xx and yy take the image center as the origin
ori = - (score_size // 2) * total_stride
xx, yy = np.meshgrid([ori + total_stride * dx for dx in range(score_size)],
[ori + total_stride * dy for dy in range(score_size)])
xx, yy = np.tile(xx.flatten(), (anchor_num, 1)).flatten(), \
np.tile(yy.flatten(), (anchor_num, 1)).flatten()
# Get anchor
anchor[:, 0], anchor[:, 1] = xx.astype(np.float32), yy.astype(np.float32)
return anchor5.siamese_init
Siamese_ Create the target dictionary state in init. The contents of state are shown in the following figure:

TrackerConfig is the configuration information, net is the network model, window is the penalty window, and also includes a series of information of the tracking target.
The code implementation is as follows:
def siamese_init(im, target_pos, target_sz, model, hp=None, device='cpu'):
"""
Initialize the tracker and build it according to the information of the target state Dictionaries
:param im: Currently processed image
:param target_pos: Target location
:param target_sz: Target size
:param model: Trained network model
:param hp: Super parameter
:param device: Hardware information
:return: Tracker state Dictionary data
"""
# Initialize state dictionary
state = dict()
# Sets the width and height of the image
state['im_h'] = im.shape[0]
state['im_w'] = im.shape[1]
# Configure the relevant parameters of the tracker
p = TrackerConfig()
# Update parameters
p.update(hp, model.anchors)
# Update parameters
p.renew()
# Get network model
net = model
# Update the parameters of the tracker according to the network parameters, mainly anchors
p.scales = model.anchors['scales']
p.ratios = model.anchors['ratios']
p.anchor_num = model.anchor_num
# Generate anchor
p.anchor = generate_anchor(model.anchors, p.score_size)
# Average of images
avg_chans = np.mean(im, axis=(0, 1))
# Enter the width, height and size of z according to the set context scale
wc_z = target_sz[0] + p.context_amount * sum(target_sz)
hc_z = target_sz[1] + p.context_amount * sum(target_sz)
s_z = round(np.sqrt(wc_z * hc_z))
# initialize the exemplar
z_crop = get_subwindow_tracking(im, target_pos, p.exemplar_size, s_z, avg_chans)
# Converting it to a Variable allows back propagation in Python
z = Variable(z_crop.unsqueeze(0))
# Special handling template
net.template(z.to(device))
# Set penalty window used
if p.windowing == 'cosine':
# Using the outer product of hanning window to generate cosine window
window = np.outer(np.hanning(p.score_size), np.hanning(p.score_size))
elif p.windowing == 'uniform':
window = np.ones((p.score_size, p.score_size))
# Each anchor has a corresponding penalty window
window = np.tile(window.flatten(), p.anchor_num)
# Update information to state dictionary
state['p'] = p
state['net'] = net
state['avg_chans'] = avg_chans
state['window'] = window
state['target_pos'] = target_pos
state['target_sz'] = target_sz
return state6.siamese_track
The method tracks the target according to siamese_init gets the target tracking box and then calls track_. Mask (if segmented) or track (not segmented) for target tracking.

1. Function prototype
def siamese_track(state, im, mask_enable=False, refine_enable=False, device='cpu', debug=False):
"""
Track the target
:param state:Target status
:param im:Tracked image frames
:param mask_enable:Mask or not
:param refine_enable:Is feature fusion performed
:param device:Hardware information
:param debug: Whether to proceed debug
:return:Track the status of the target state Dictionaries
"""2. Current status of target
Get the current state of the target. If you debug, you can draw the state of the target on the image.
# Get target status
p = state['p']
net = state['net']
avg_chans = state['avg_chans']
window = state['window']
target_pos = state['target_pos']
target_sz = state['target_sz']
# The width, height and size of the tracking frame containing surrounding information
wc_x = target_sz[1] + p.context_amount * sum(target_sz)
hc_x = target_sz[0] + p.context_amount * sum(target_sz)
s_x = np.sqrt(wc_x * hc_x)
# Scale of input box size of template model to tracking box
scale_x = p.exemplar_size / s_x
# The detection area is obtained using the same proportion as the template branch
d_search = (p.instance_size - p.exemplar_size) / 2
pad = d_search / scale_x
s_x = s_x + 2 * pad
# Expand the detection box to include surrounding information
crop_box = [target_pos[0] - round(s_x) / 2, target_pos[1] - round(s_x) / 2, round(s_x), round(s_x)]
# If debug
if debug:
# Copy picture
im_debug = im.copy()
# Generate crop_box
crop_box_int = np.int0(crop_box)
# Draw it on the picture
cv2.rectangle(im_debug, (crop_box_int[0], crop_box_int[1]),
(crop_box_int[0] + crop_box_int[2], crop_box_int[1] + crop_box_int[3]), (255, 0, 0), 2)
# Picture display
cv2.imshow('search area', im_debug)
cv2.waitKey(0)3. Target tracking
Call track according to whether to segment the target_ Mask or track for target tracking.
# Convert the target position proportionally to the target to be tracked
x_crop = Variable(get_subwindow_tracking(im, target_pos, p.instance_size, round(s_x), avg_chans).unsqueeze(0))
#Call network for target tracking
if mask_enable:
# Target segmentation
score, delta, mask = net.track_mask(x_crop.to(device))
else:
# Only target tracking, no segmentation
score, delta = net.track(x_crop.to(device))4. Classification and regression
The results of target regression and classification are achieved through RPN network, as shown in the figure below:
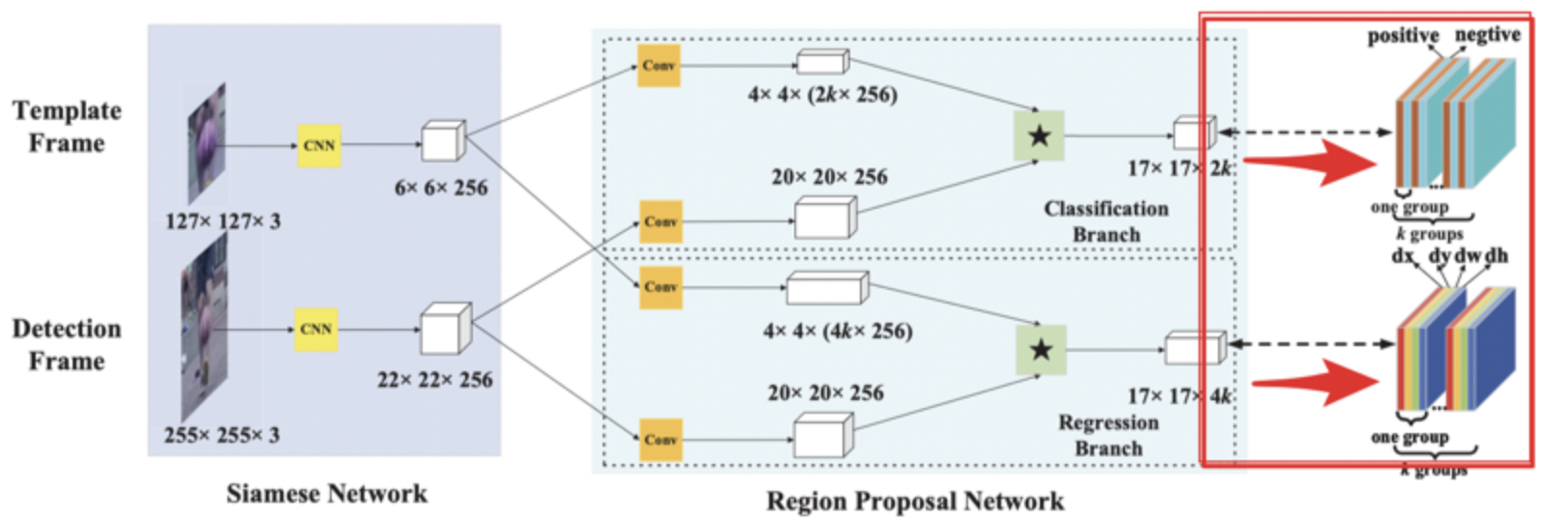
The results returned by the rpn network are not the width, height and position of the real detection frame, but:
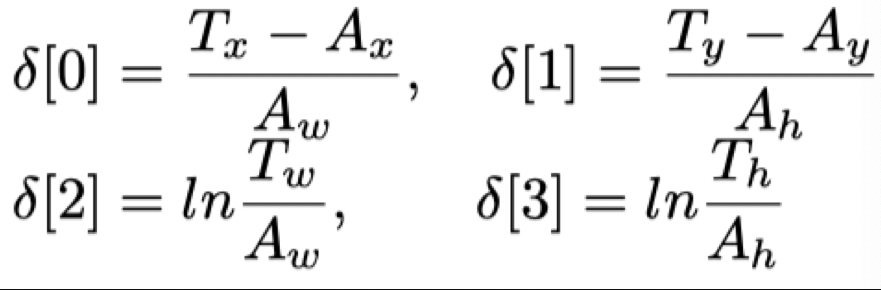
Where: delta[0],delta[1],delta[2,],delta[3] is the result returned by the network model. In the following code, it refers to delta[0],delta[1],delta[2,],delta[3] on the right side of the equation. Here, we require the predicted position of the target box, that is, TX, ty, TW, th (Delta [0], Delta [1], Delta [2], Delta [3] on the left of the equation in the following code), ax, ay, aw and ah represent the center point, width and height of the anchor
The following code refers to p.anchor. Convert to the following formula in the forecast:
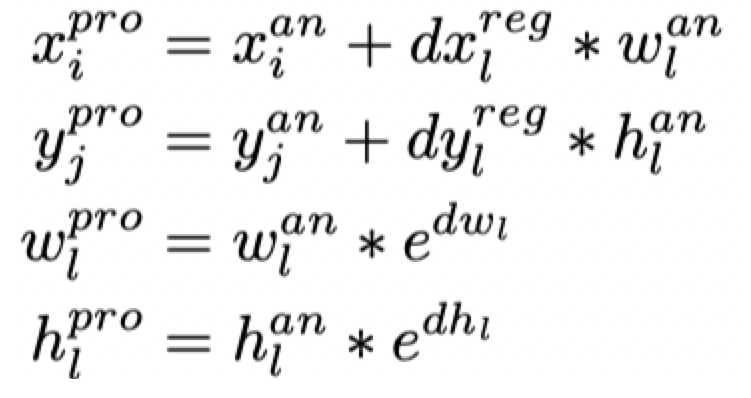
The code is as follows:
# Target box regression result (convert it to the style of 4 *...)
delta = delta.permute(1, 2, 3, 0).contiguous().view(4, -1).data.cpu().numpy()
# Target classification result (convert it to the style of 2 *...)
score = F.softmax(score.permute(1, 2, 3, 0).contiguous().view(2, -1).permute(1, 0), dim=1).data[:,
1].cpu().numpy()
# Calculate the center point coordinates of the target frame, delta[0],delta[1], and width delta[2] and height delta[3].
delta[0, :] = delta[0, :] * p.anchor[:, 2] + p.anchor[:, 0]
delta[1, :] = delta[1, :] * p.anchor[:, 3] + p.anchor[:, 1]
delta[2, :] = np.exp(delta[2, :]) * p.anchor[:, 2]
delta[3, :] = np.exp(delta[3, :]) * p.anchor[:, 3]5. Standard punishment
The next step is to select the optimal target using cosine window and scale penalty. Firstly, scale suppression is carried out. k is a super parameter, r is the aspect ratio, and s is the equivalent side length:

def sz(w, h):
"""
Calculate equivalent side length
:param w: wide
:param h: high
:return: Equivalent side length
"""
pad = (w + h) * 0.5
sz2 = (w + pad) * (h + pad)
return np.sqrt(sz2)
def sz_wh(wh):
"""
Calculate equivalent side length
:param wh: Array of width and height
:return: Equivalent side length
"""
pad = (wh[0] + wh[1]) * 0.5
sz2 = (wh[0] + pad) * (wh[1] + pad)
return np.sqrt(sz2)Next, the penalty is performed, and the non maximum suppression is used to obtain the final target tracking frame.
# Non maximum suppression
def change(r):
"""
take r And 1/r Bit by bit comparison takes the maximum value
:param r:
:return:
"""
return np.maximum(r, 1. / r)
# size penalty
target_sz_in_crop = target_sz*scale_x
s_c = change(sz(delta[2, :], delta[3, :]) / (sz_wh(target_sz_in_crop))) # scale penalty
r_c = change((target_sz_in_crop[0] / target_sz_in_crop[1]) / (delta[2, :] / delta[3, :])) # ratio penalty
# p.penalty_k-hyperparameter
penalty = np.exp(-(r_c * s_c - 1) * p.penalty_k)
# Punish the classification results
pscore = penalty * score
# cos window (motion model)
# Window penalty: superimpose a window distribution value according to a certain weight
pscore = pscore * (1 - p.window_influence) + window * p.window_influence
# Index to obtain the optimal weight
best_pscore_id = np.argmax(pscore)
# Map the optimal prediction results back to the original graph
pred_in_crop = delta[:, best_pscore_id] / scale_x
# Calculate lr
lr = penalty[best_pscore_id] * score[best_pscore_id] * p.lr # lr for OTB
# Calculate the position and size of the target: obtain the position and size of the target according to the predicted offset
res_x = pred_in_crop[0] + target_pos[0]
res_y = pred_in_crop[1] + target_pos[1]
res_w = target_sz[0] * (1 - lr) + pred_in_crop[2] * lr
res_h = target_sz[1] * (1 - lr) + pred_in_crop[3] * lr
# Location and size of target
target_pos = np.array([res_x, res_y])
target_sz = np.array([res_w, res_h])6. Segmentation
In this part, the target is segmented, mainly according to whether the refine module is used to segment the image of the module.
# If split
if mask_enable:
# Location index for obtaining optimal prediction results: NP unravel_ Index: converts a plane index or a plane index array to a tuple of a coordinate array
best_pscore_id_mask = np.unravel_index(best_pscore_id, (5, p.score_size, p.score_size))
delta_x, delta_y = best_pscore_id_mask[2], best_pscore_id_mask[1]
# Whether to perform feature fusion
if refine_enable:
# Call track_refine, run the refine module, as shown in Figure 1 × one × The target mask is obtained from the feature vector of 256 and the feature map before detection down sampling
mask = net.track_refine((delta_y, delta_x)).to(device).sigmoid().squeeze().view(
p.out_size, p.out_size).cpu().data.numpy()
else:
# Mask data is generated directly without fusion
mask = mask[0, :, delta_y, delta_x].sigmoid(). \
squeeze().view(p.out_size, p.out_size).cpu().data.numpy()According to the segmentation results, the location and size of target tracking are further obtained.
First, affine transform the image:
def crop_back(image, bbox, out_sz, padding=-1):
"""
Affine transformation of image
:param image: image
:param bbox:
:param out_sz: Output size
:param padding: Expand
:return: Results after affine transformation
"""
# Construct transformation matrix
# Scale coefficient
a = (out_sz[0] - 1) / bbox[2]
b = (out_sz[1] - 1) / bbox[3]
# Translation
c = -a * bbox[0]
d = -b * bbox[1]
mapping = np.array([[a, 0, c],
[0, b, d]]).astype(np.float)
# Affine transformation
crop = cv2.warpAffine(image, mapping, (out_sz[0], out_sz[1]),
flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT,
borderValue=padding)
return cropThen, after affine transformation of the segmentation result, the minimum circumscribed rectangle of its contour is calculated to obtain the position of the target, so that the target frame we get will change adaptively with the movement of the target.
# Ratio of the length of the detection area box to the size of the input model: scaling factor
s = crop_box[2] / p.instance_size
# Predicted template area box
sub_box = [crop_box[0] + (delta_x - p.base_size / 2) * p.total_stride * s,
crop_box[1] + (delta_y - p.base_size / 2) * p.total_stride * s,
s * p.exemplar_size, s * p.exemplar_size]
# Scaling factor
s = p.out_size / sub_box[2]
# Background box
back_box = [-sub_box[0] * s, -sub_box[1] * s, state['im_w'] * s, state['im_h'] * s]
# affine transformation
mask_in_img = crop_back(mask, back_box, (state['im_w'], state['im_h']))
# Mask results are obtained
target_mask = (mask_in_img > p.seg_thr).astype(np.uint8)
# Find profile based on cv2 version
if cv2.__version__[-5] == '4':
# There are only two parameters returned in opencv4 and four in other versions
contours, _ = cv2.findContours(target_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
else:
_, contours, _ = cv2.findContours(target_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# Gets the area of the profile
cnt_area = [cv2.contourArea(cnt) for cnt in contours]
if len(contours) != 0 and np.max(cnt_area) > 100:
# Gets the contour with the largest area
contour = contours[np.argmax(cnt_area)] # use max area polygon
# Convert to* Form of 2
polygon = contour.reshape(-1, 2)
# pbox = cv2.boundingRect(polygon) # Min Max Rectangle
# After getting the smallest circumscribed rectangle, find the four vertices of the rectangle
prbox = cv2.boxPoints(cv2.minAreaRect(polygon)) # Rotated Rectangle
# box_in_img = pbox
# Get tracking box
rbox_in_img = prbox
else: # empty mask
# The location is obtained according to the predicted target position and size
location = cxy_wh_2_rect(target_pos, target_sz)
# Get the four vertices of the tracking box
rbox_in_img = np.array([[location[0], location[1]],
[location[0] + location[2], location[1]],
[location[0] + location[2], location[1] + location[3]],
[location[0], location[1] + location[3]]])7. Tracking results
Get the location and size of the target, and update the information into the state object.
# Get the position and size of the target
target_pos[0] = max(0, min(state['im_w'], target_pos[0]))
target_pos[1] = max(0, min(state['im_h'], target_pos[1]))
target_sz[0] = max(10, min(state['im_w'], target_sz[0]))
target_sz[1] = max(10, min(state['im_h'], target_sz[1]))
# Update state object
state['target_pos'] = target_pos
state['target_sz'] = target_sz
state['score'] = score[best_pscore_id]
state['mask'] = mask_in_img if mask_enable else []
state['ploygon'] = rbox_in_img if mask_enable else []
return state6. Network test
During network test, execute the following at the terminal:
cd $SiamMask/experiments/siammask_sharp bash test_mask_refine.sh config_vot.json SiamMask_VOT.pth VOT2016 0
test_ mask_ refine. The contents in SH are as follows:
# Judge whether it is an empty string. If it is empty, you need to enter parameters,
if [ -z "$4" ]
then
# echo command is used to display string, and it will be displayed on the terminal
echo "Need input parameter!"
echo "Usage: bash `basename "$0"` \$CONFIG \$MODEL \$DATASET \$GPUID"
exit
# fi is the end of the if statement, equivalent to end if
fi
# Indicates the location of the project, which is the top position
ROOT=/Users/yaoxiaoying/Documents/01-work/03.computer vision /03.Intelligent transportation/04.Single target tracking/SiamMask-master
# Setting environment variables
export PYTHONPATH=$ROOT:$PYTHONPATH
# Create log path
mkdir -p logs
# Set parameters
config=$1
model=$2
dataset=$3
gpu=$4
# Run test Py, the input parameters are: (1) config file: config_vot.json; (2)mode: SiamMask_VOT.pth; (3)dataset:VOT2016; (4)gpu:0
CUDA_VISIBLE_DEVICES=$gpu python -u $ROOT/tools/test.py \
--config $config \
--resume $model \
--mask --refine \
--dataset $dataset 2>&1 | tee logs/test_$dataset.log
# 2> & 1: direct errors to standard output
# tee logs/test_$dataset.log: add the contents of the standard output to the log fileTest results:
[2020-02-10 21:02:20,709-rk0-test.py#856] Total Lost: 44 [2020-02-10 21:02:20,710-rk0-test.py#858] Mean Speed: 5.85 FPS
Summary:
- Network testing uses data to test the performance of the network. The process is to load data, model and track the targets in the data
- The network test code mainly includes
- siammese_init: trace initialization
- siamese_trask: track the target