Sony camera API official website Collection

It's such a thing. It's cruel
Put it on your mobile phone

It's ready

WiFi connection real-time transmission
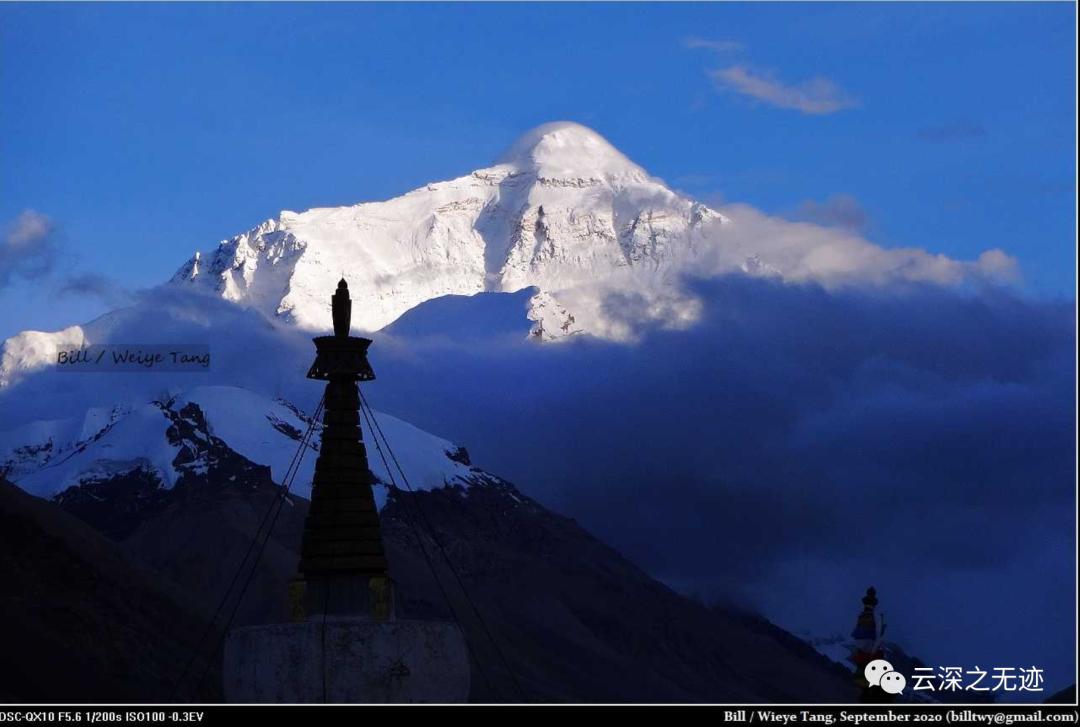
There is an old man who can beat Mount Everest with QX10
On the API page, QX10 and QX100 are put together. I don't know if the two codes can be mixed? I'll test it.

We have a list of API s
There are Android interfaces and, of course, Apple's
pip install opencv-python
pip install requests
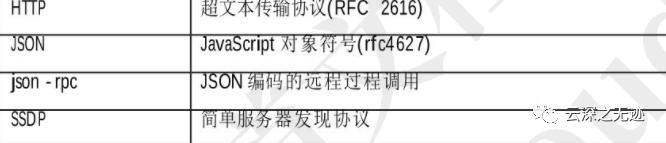
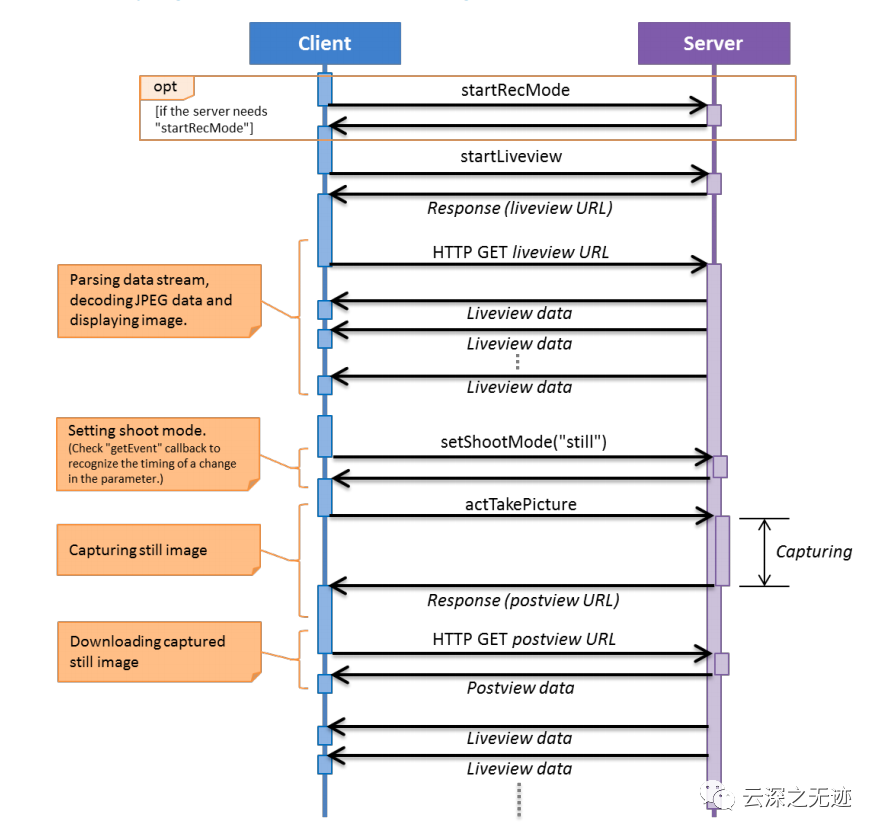
Using these four protocols, SSDP is used to let the host discover the camera, HTTP to connect for a long time, and then json sends the control sequence. I like the word sequence so much.

The WiFi password is inside
zP2EbQVr
Zhenima ghost animal, this code....
https://sourceforge.net/projects/sony-desktop-dsc-qx10/
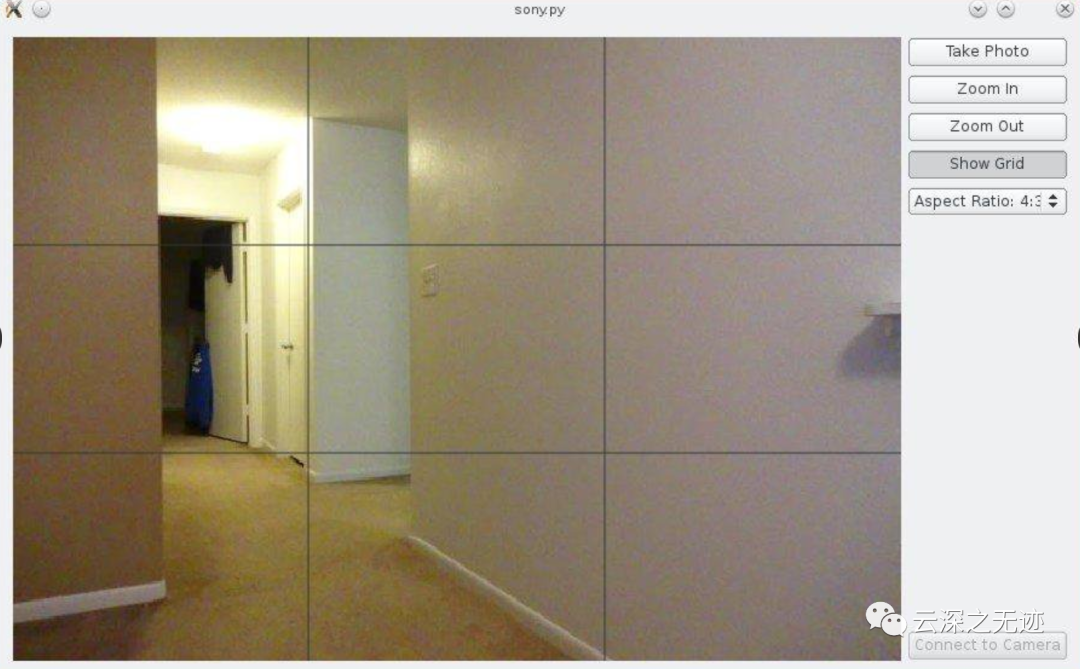
QT4 write interface

Take a good look at other people's white cameras
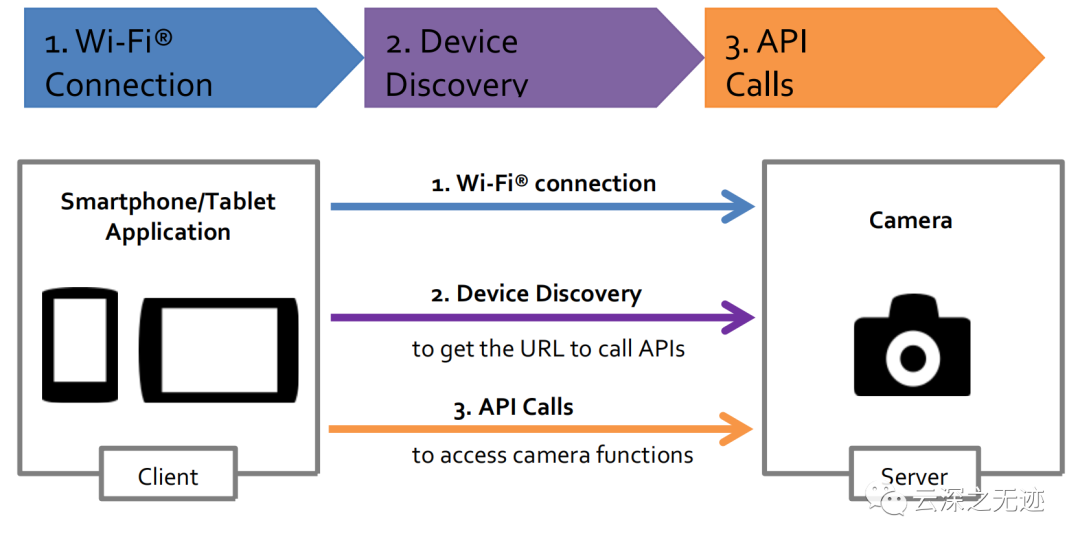
This is the connection diagram of the latest SDK
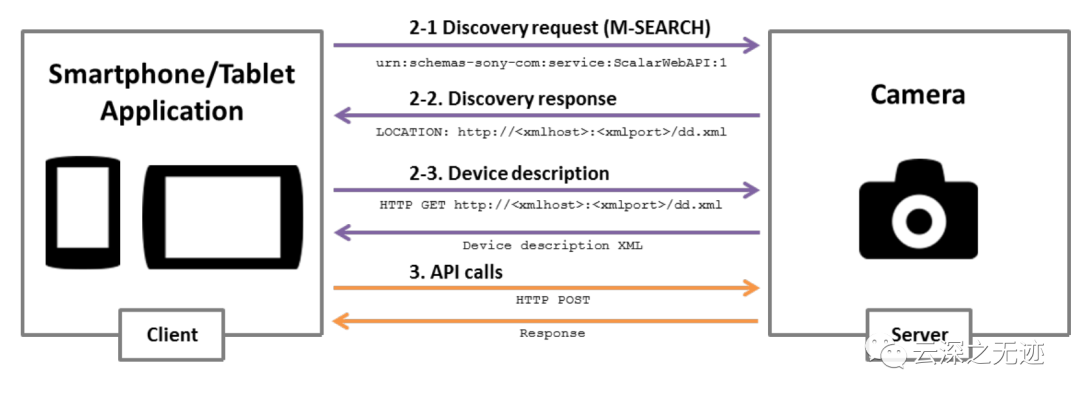
This is the previous connection diagram, which is actually the same
- json decoding and sending instructions
- requests to package the HTTP protocol
- Numpy is an efficient array, which is used with opencv library
- cv2 is the name of opencv
- There are also multithreaded libraries
- cmd is the calling console protocol
Complete collection of functions and classes
Take out the displayed work separately
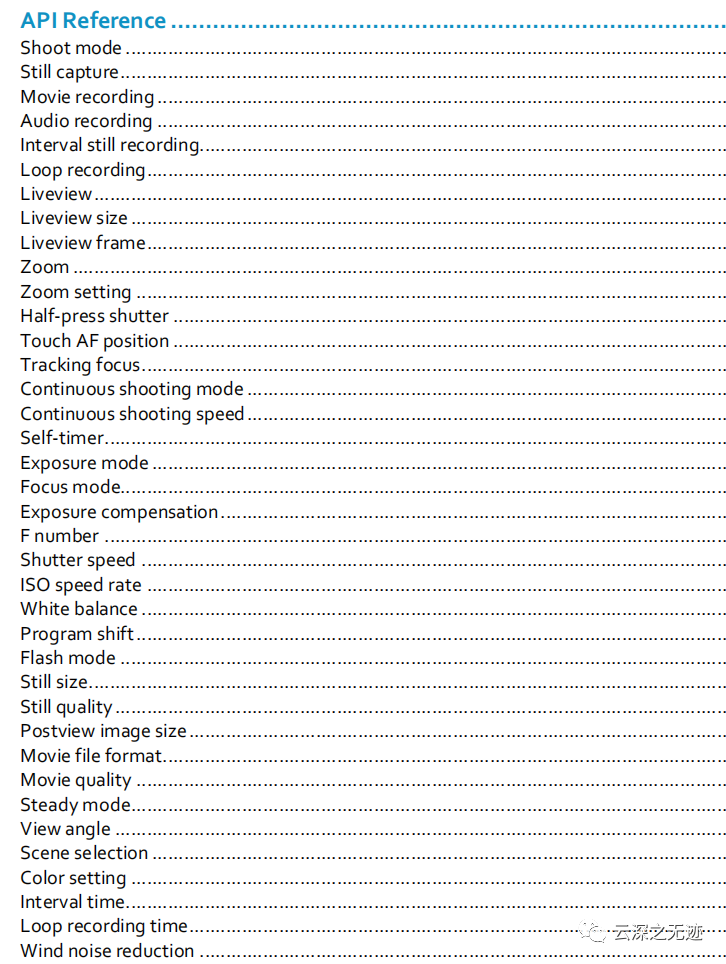
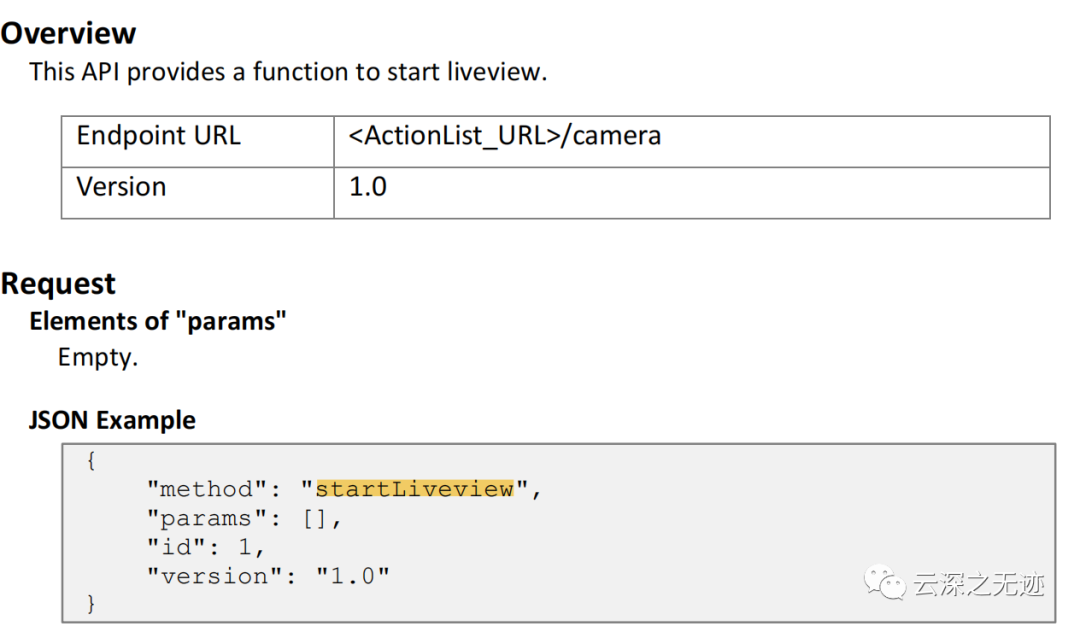
Can you see the API I'm interested in in in the API
The first method, preview screen:

Ending method
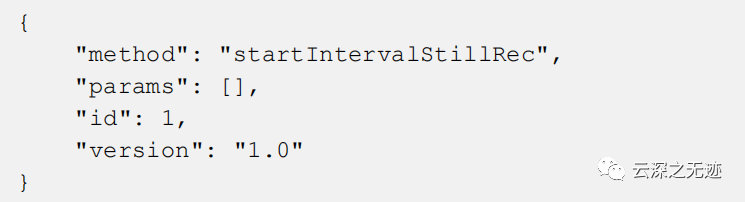
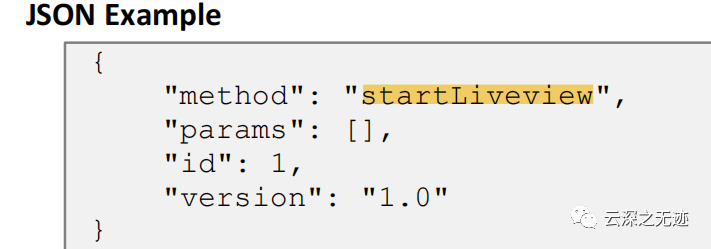
json example

Reply after execution
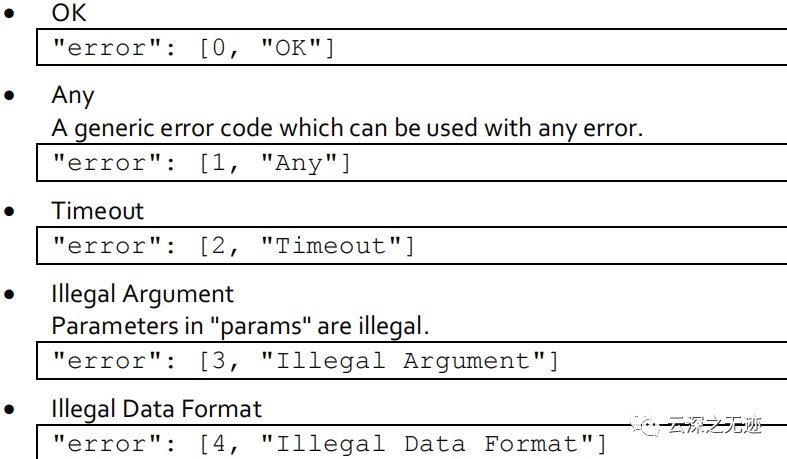
error code

Let's first write a method to obtain video stream, just like a water pipe interface
When you get this data stream, we should decode it
Next, decode
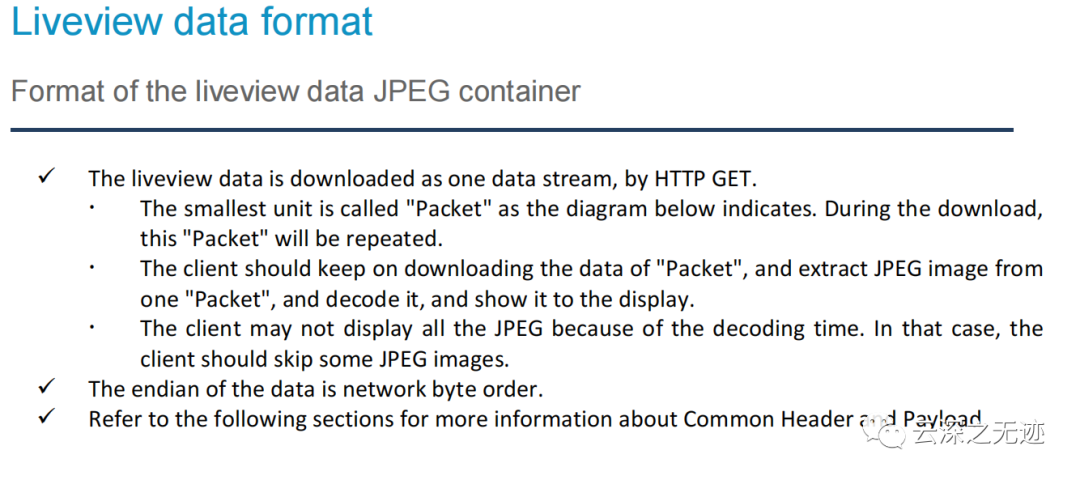
download the real-time view data as a data stream through HTTP GET.
The smallest unit is called "data packet", as shown in the figure below. This "packet" will be repeated during the download process.
‡ the client shall continuously download the data of "Packet" and receive it from a "Packet", decode it and display it on the display.
The client may not be able to display all JPEG due to decoding time. under these circumstances,
The client should skip some JPEG images.
The byte order of data is the network byte order.

Whether you understand it or not, you can find that what the machine transmits is a single frame
Your head to head is the first step of the long march. You have to see if its data part can decode something.
The Common Header consists of the following 8 bytes.
‡ start byte: 1 [B]
‡ 0xFF, fixed
Payload type: 1 [b] - indicates the type of Payload
‡ 0x01 = for live view images
‡ 0x02 = frame information for live view
‡ serial number: 2 [B]
‡ frame number, 2-byte integer, incremented per frame
‡ this frame number will be repeated.
timestamp: 4 [B]
‡ 4-byte integer in Payload type
‡ if Payload type = 0x01, the timestamp of Common Header is in milliseconds. The start time may not start from zero, depending on the server.
Payload head
The payload header format will be 128 bytes as follows. start code: 4[B]
‡ fixed (0x24, 0x35, 0x68, 0x79)
‡ this can be used to detect payload headers. payload data size without fill size: 3[B]
‡ bytes.
if Payload Type = 0x01, the size represents the size of JPEG in Payload data.
if Payload Type = 0x02, the size indicates the size of Frame information data in Payload data.
filling size: 1[B]
‡ padding size of Payload data after JPEG data, bytes.
If Payload Type = 0x01, the header format is as follows. reserved: 4[B]
‡ sign: 1[B]
‡ the value is set to 0x00
‡ other values are reserved
reserved: 115[B]
‡ all fixed, 0x00
If Payload Type = 0x02, the header format is as follows. frame information data version: 2[B]
‡ data version of frame information data.
‡ the upper 1 byte indicates the major version and the lower 1 byte indicates the minor version
edition.
‡ 0x01, 0x00: version 1.0
The client should use the data version to ignore the data it does not understand.
number of frames: 2[B]
‡ number of frame data.
single frame data size: 2[B]
‡ single size frame data. If the data version is 1.0, the data size is 16[B].
The client can read each frame using the data size.
reserved: 114[B]
‡ all fixed, 0x00
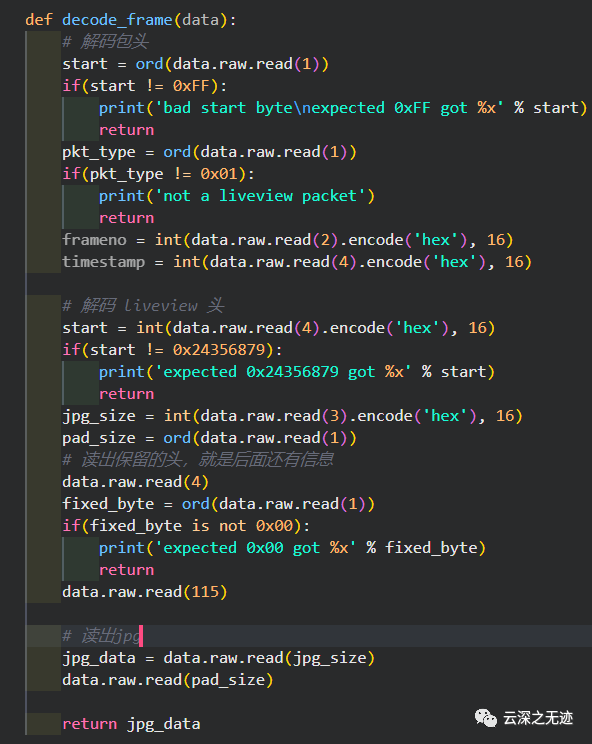
Maybe that's it. First see if the head is the right head, and then read the following

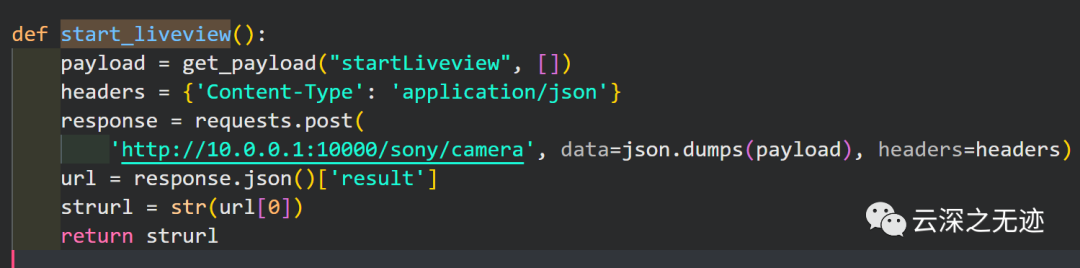
Give this command to get to start the video stream_ The function payload()
Here
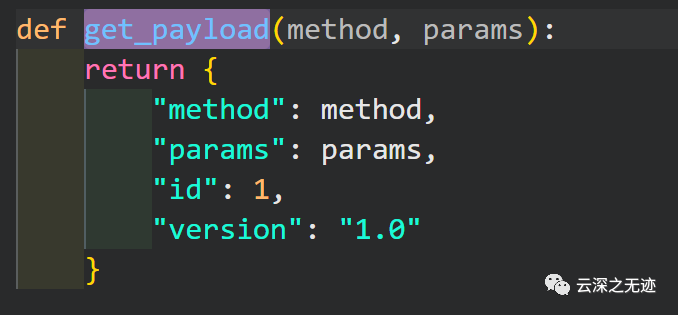
This function is packaged like json
Is it as like as two peas?
https://developer.mozilla.org/zh-CN/docs/Web/HTTP/Headers/Content-Type
Then the front-end knowledge came
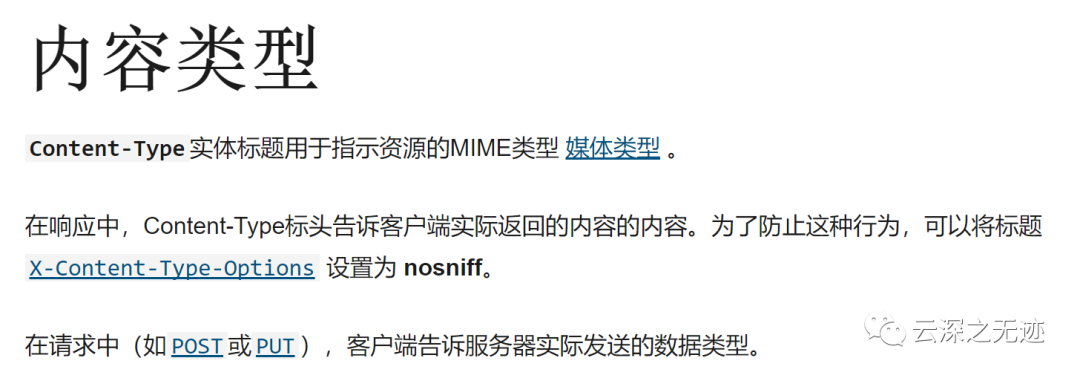
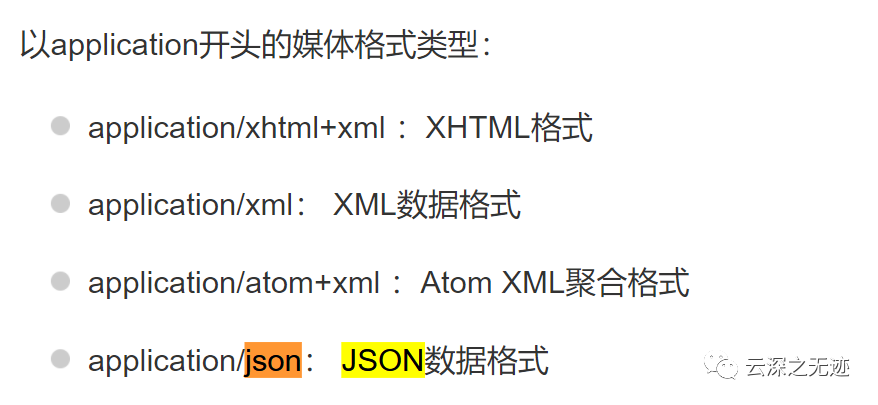
headers = {'Content-Type': 'application/json'}So it's json
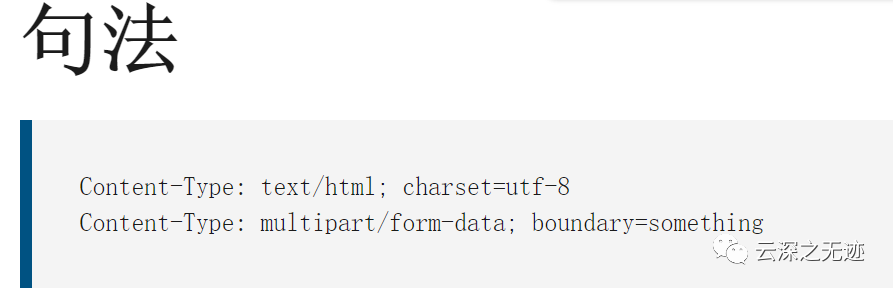
Look at the grammar. There's nothing wrong with it
This is even more correct

We send a data out like this
https://docs.python-requests.org/zh_CN/latest/user/quickstart.html
Document here
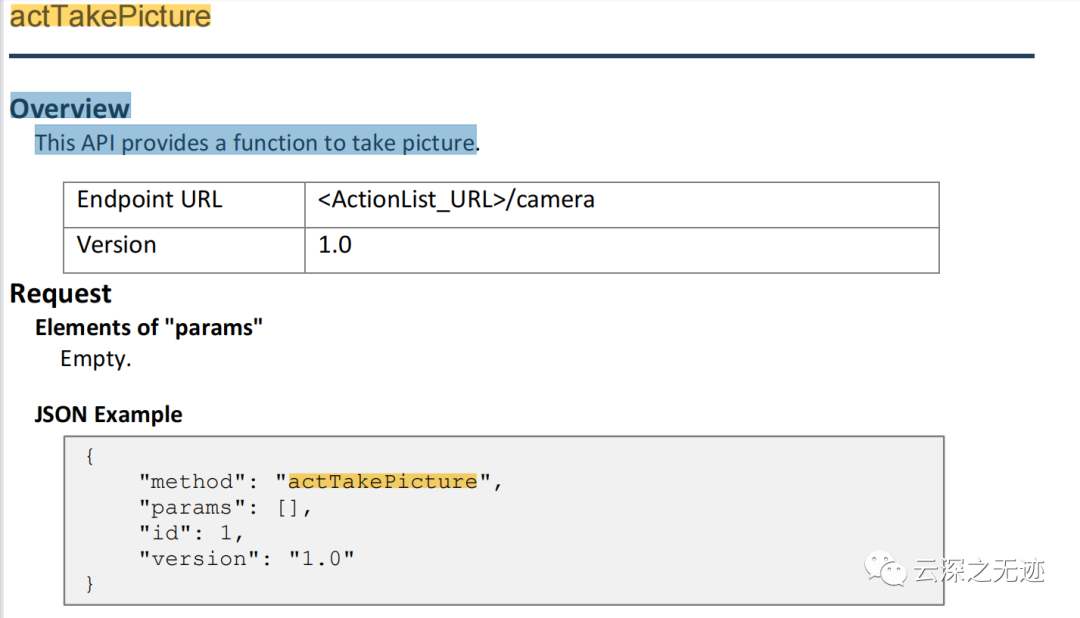
Order to take a picture


The get method is to get some data
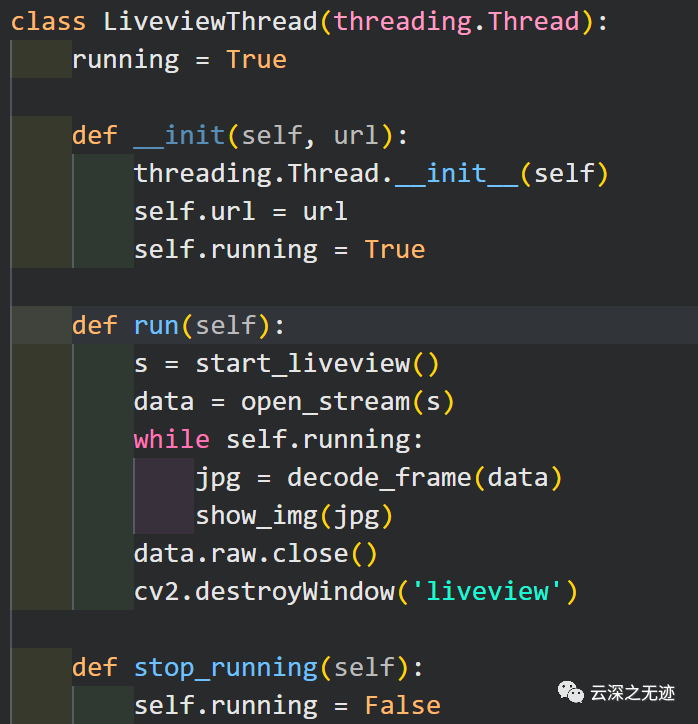
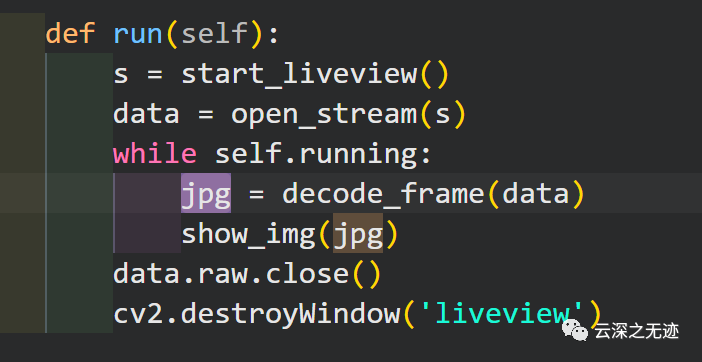
- Start the video stream. The return of this method is a strurl
- Then I opened the video stream
- Then the following is the decoding work
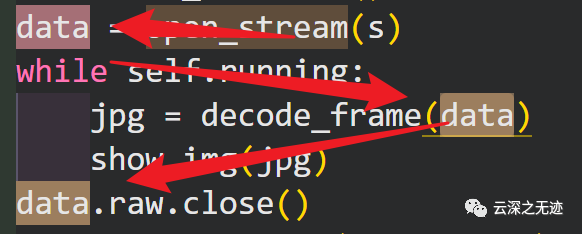
Get the data from the camera and give the decoding method
This decoding method gives the video data to the following method

Display, Numpy's Library transforms the data, and then passes it to our cv2, which is displayed by imshow
This may look so clear
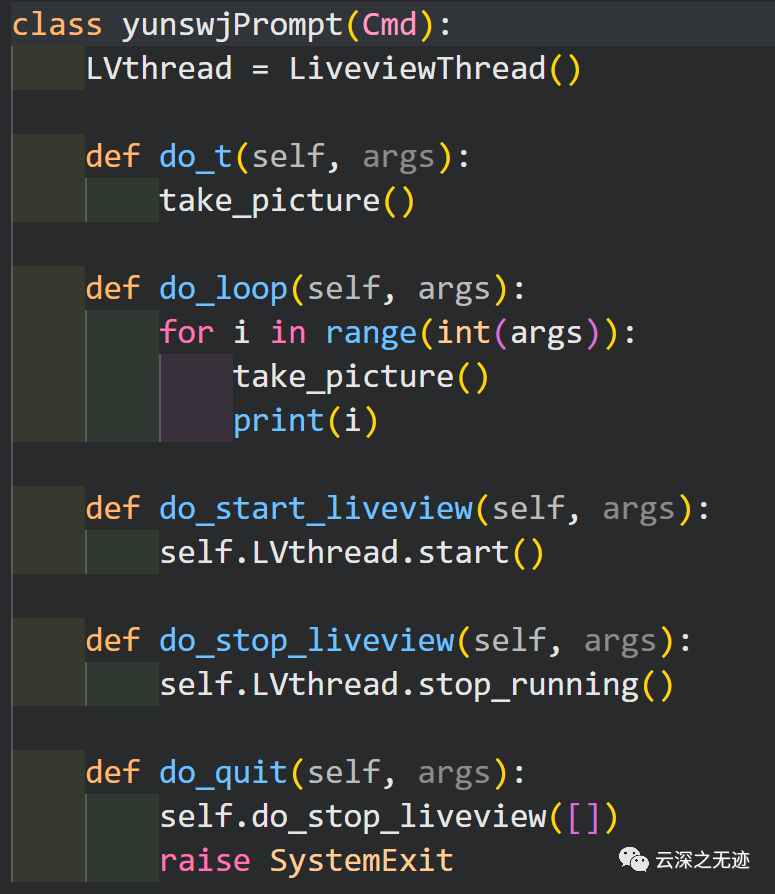
It encapsulates a class for camera connection and data decoding. Then I'm writing something to manage the state of the data flow, such as taking a picture and stopping it.
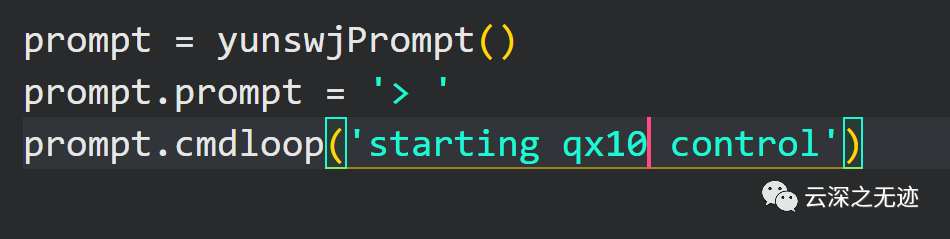
Next, you can create a new object, which is actually

The above class has been called
"""QX10 interfacing code for python"""
import json
import requests
import numpy as np
import cv2
import threading
from cmd import Cmd
class LiveviewThread(threading.Thread):
running = True
def __init(self, url):
threading.Thread.__init__(self)
self.url = url
self.running = True
def run(self):
s = start_liveview()
data = open_stream(s)
while self.running:
jpg = decode_frame(data)
show_img(jpg)
data.raw.close()
cv2.destroyWindow('liveview')
def stop_running(self):
self.running = False
class yunswjPrompt(Cmd):
LVthread = LiveviewThread()
def do_t(self, args):
take_picture()
def do_loop(self, args):
for i in range(int(args)):
take_picture()
print(i)
def do_start_liveview(self, args):
self.LVthread.start()
def do_start_liveview(self, args):
self.LVthread.stop_running()
def do_quit(self, args):
self.do_stop_liveview([])
raise SystemExit
def get_payload(method, params):
return {
"method": method,
"params": params,
"id": 1,
"version": "1.0"
}
def take_picture():
payload = get_payload("actTakePicture", [])
headers = {'Content-Type': 'application/json'}
response = requests.post(
'http://10.0.0.1:10000/sony/camera', data=json.dumps(payload), headers=headers)
url = response.json()['result']
strurl = str(url[0][0])
return strurl
def get_event():
payload = get_payload("getEvent", [False])
headers = {'Content-Type': 'application/json'}
response = requests.post(
'http://10.0.0.1:10000/sony/camera', data=json.dumps(payload), headers=headers)
return response
def get_picture(url, filename):
response = requests.get(url)
chunk_size = 1024
with open(filename, 'wb') as fd:
for chunk in response.iter_content(chunk_size):
fd.write(chunk)
# LIVEVIEW STUFF
def start_liveview():
payload = get_payload("startLiveview", [])
headers = {'Content-Type': 'application/json'}
response = requests.post(
'http://10.0.0.1:10000/sony/camera', data=json.dumps(payload), headers=headers)
url = response.json()['result']
strurl = str(url[0])
return strurl
def open_stream(url):
return requests.get(url, stream=True)
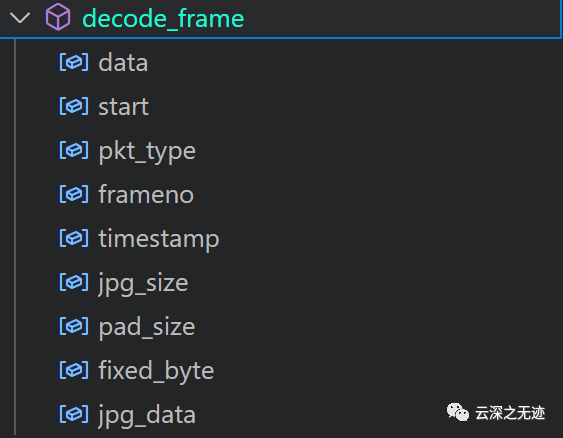
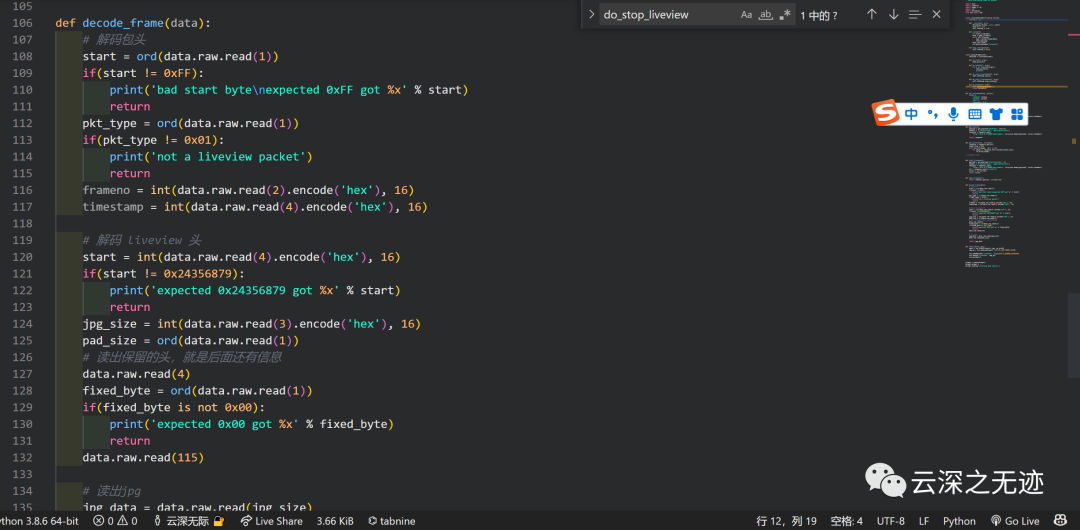
def decode_frame(data):
# Decoded packet header
start = ord(data.raw.read(1))
if(start != 0xFF):
print('bad start byte\nexpected 0xFF got %x' % start)
return
pkt_type = ord(data.raw.read(1))
if(pkt_type != 0x01):
print('not a liveview packet')
return
frameno = int(data.raw.read(2).encode('hex'), 16)
timestamp = int(data.raw.read(4).encode('hex'), 16)
# Decode liveview header
start = int(data.raw.read(4).encode('hex'), 16)
if(start != 0x24356879):
print('expected 0x24356879 got %x' % start)
return
jpg_size = int(data.raw.read(3).encode('hex'), 16)
pad_size = ord(data.raw.read(1))
# Read out the reserved header, that is, there is information behind it
data.raw.read(4)
fixed_byte = ord(data.raw.read(1))
if(fixed_byte is not 0x00):
print('expected 0x00 got %x' % fixed_byte)
return
data.raw.read(115)
# Read jpg
jpg_data = data.raw.read(jpg_size)
data.raw.read(pad_size)
return jpg_data
def show_img(str_jpg):
nparr = np.fromstring(str_jpg, np.uint8)
img_np = cv2.imdecode(nparr, cv2.CV_LOAD_IMAGE_COLOR)
cv2.namedWindow('liveview', flags=cv2.CV_WINDOW_AUTOSIZE)
cv2.imshow('liveview', img_np)
cv2.waitKey(1)
prompt = yunswjPrompt()
prompt.prompt = '> '
prompt.cmdloop('starting qx10 control')Code attached
VSCode and pycham always feel shortcomings
There is something wrong with the gateway in this place. I didn't figure it out...