HC-05 Bluetooth serial communication
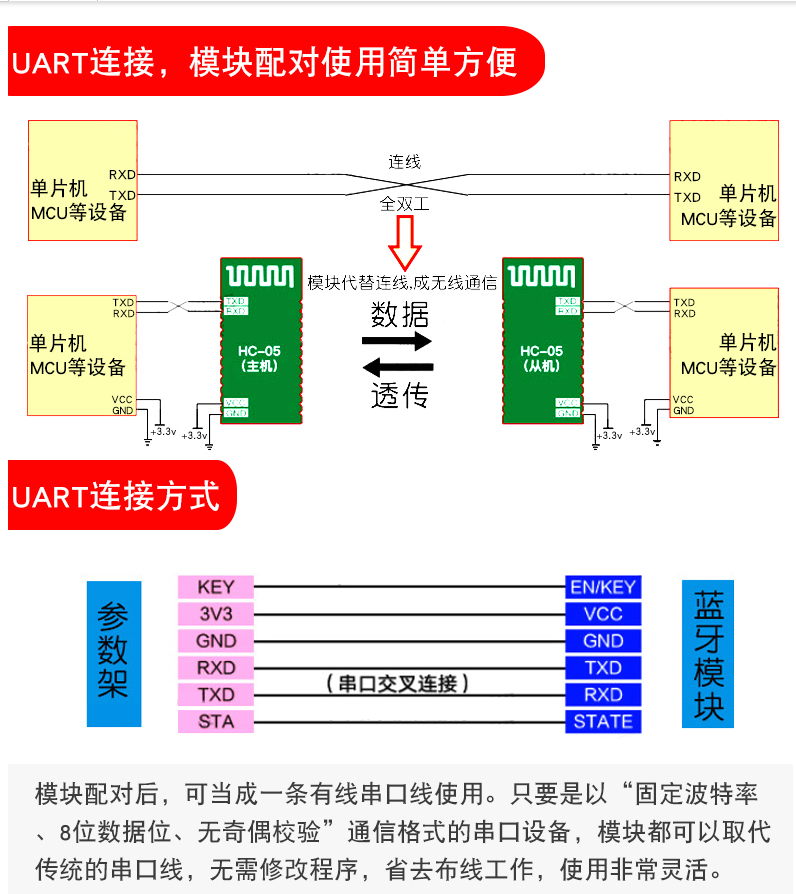
HC05 module is a high-performance master-slave Bluetooth serial port module. It is a PCBA board integrating Bluetooth function. It is very convenient for short-range wireless communication.
It can be seen from a treasure merchant that Bluetooth can be used in many ways. Here I use Bluetooth host connection, so we need to prepare the following devices:
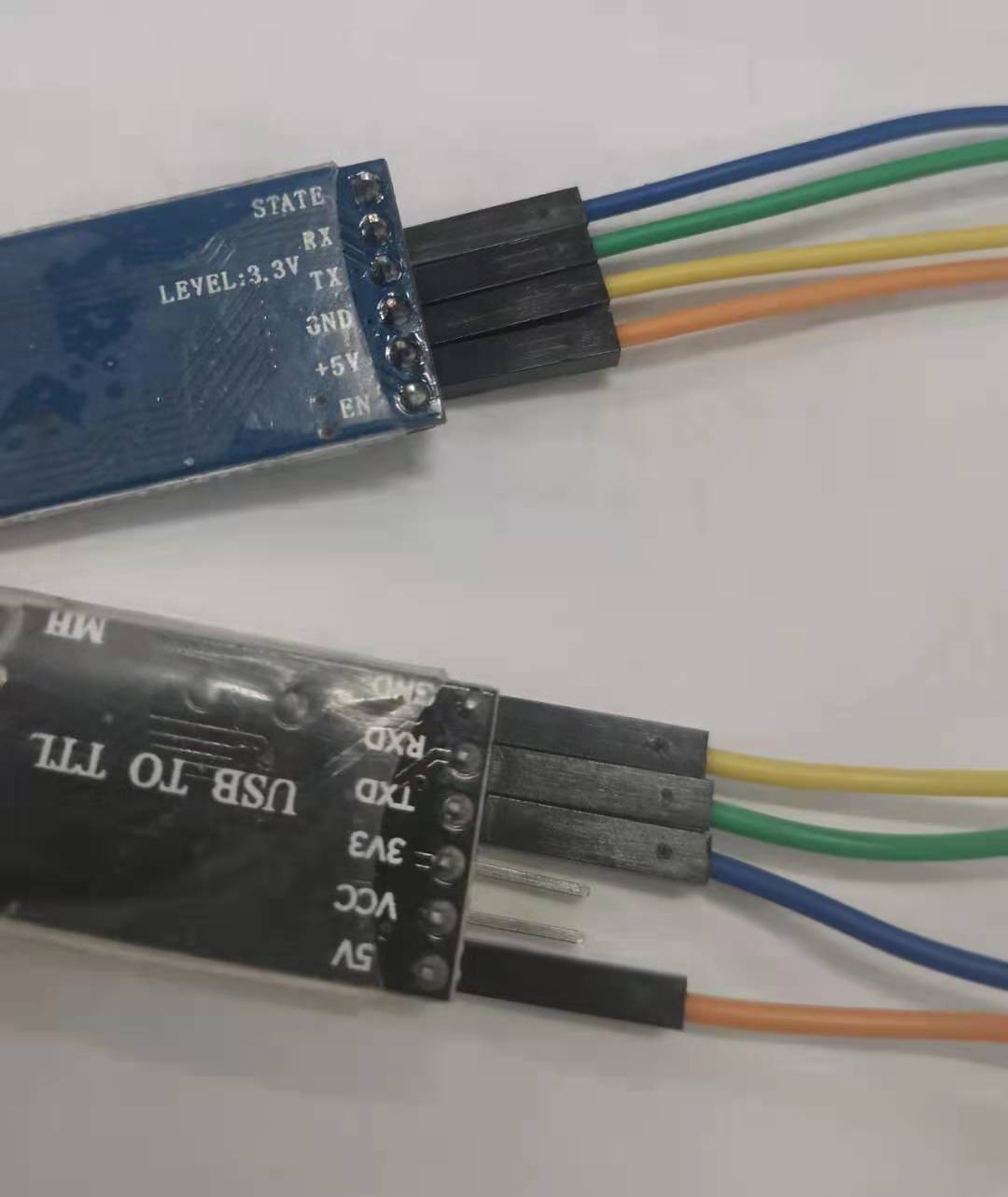
Two HC-05 Bluetooth modules, one USB-TTL and STM32F103ZET6.
In addition, prepare the serial port debugging assistant:
XCOMV2.0
Before configuring the Bluetooth module, you need to understand the debugging of the Bluetooth module.
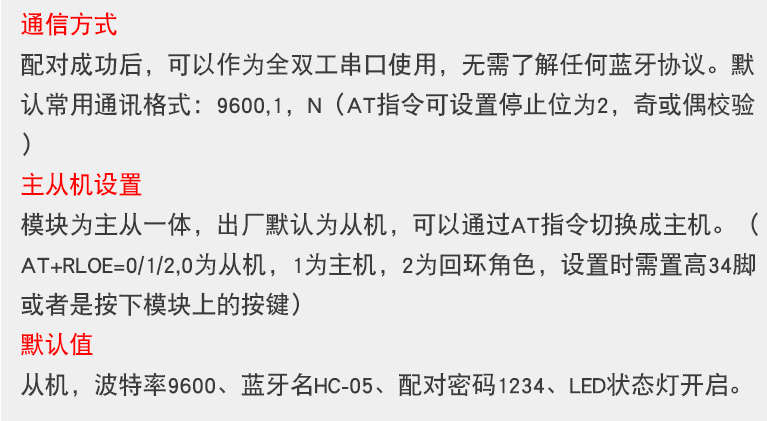
HC-05 Bluetooth serial communication module has two working modes: command response working mode and automatic connection working mode. In the automatic connection mode, the module can be divided into
There are three working roles: Master, Slave and Loopback.
When the module is in the automatic connection mode, it will automatically connect the data transmission according to the preset mode;
When the module is in command response mode, it can execute at commands. Users can send various AT commands to the module, set control parameters or issue control commands for the module
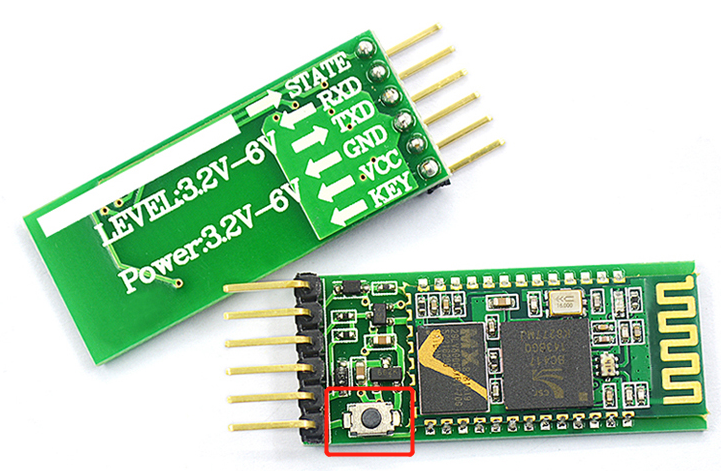
By default, the module is a slave and needs to be switched to the host through the AT command. There is a small key in the module. Press and hold the key to relax and power on, and observe the light on the Bluetooth. When the light flashes quickly, it is the automatic connection working mode. When the light flashes slowly, it enters the command response working mode.
Enter the command response working mode and configure it through AT command
Refer to Blogger configuration here.
https://blog.csdn.net/seek97/article/details/81333701
Bluetooth 1 (host)
AT+ORGL AT+PSWD="123456" AT+ROLE=1
Bluetooth 2 (slave)
AT+ORGL AT+PSWD="123456" AT+ROLE=0 AT+ADDR? //The address of Bluetooth 2 is returned here: 98d3:35:cd33 AT+UART=38400,0,0 //The serial baud rate of Bluetooth 2 is returned here: 38400,0,0
Bluetooth 1 (host)
AT+BIND=98d3,35,cd33 AT+BIND? //The binding address is returned here: 98d3:35:cd33 AT+UART=38400,0,0 AT+UART? //The serial baud rate of Bluetooth 1 is returned here: 38400,0,0 AT+CMODE=0
usart.c file configuration
Configure the two Bluetooth modules according to the steps, and then the STM32 serial port code. There is nothing to talk about here. Here, use the punctual atomic code. Pay attention to the baud rate. It is the same as the serial port.
#include "sys.h"
#include "usart.h"
//
//If ucos is used, include the following header file
#if SYSTEM_SUPPORT_OS
#include "includes.h" // ucos usage
#endif
//
//Add the following code to support the printf function without selecting use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//Support functions required by the standard library
struct __FILE
{
int handle;
};
FILE __stdout;
//Definition_ sys_exit() to avoid using half host mode
void _sys_exit(int x)
{
x = x;
}
//Redefine fputc function
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//Cycle sending until sending is completed
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX / / if receive is enabled
//Serial port 1 interrupt service program
//Note that reading usartx - > SR can avoid inexplicable errors
u8 USART_RX_BUF[USART_REC_LEN]; //Receive buffer, maximum USART_REC_LEN bytes
//Receiving status
//bit15, Reception completion flag
//bit14, 0x0d received
//bit13~0, Number of valid bytes received
u16 USART_RX_STA=0; //Receive status flag
void uart1_init(u32 bound){
//GPIO port settings
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //Enable USART1, GPIOA clock
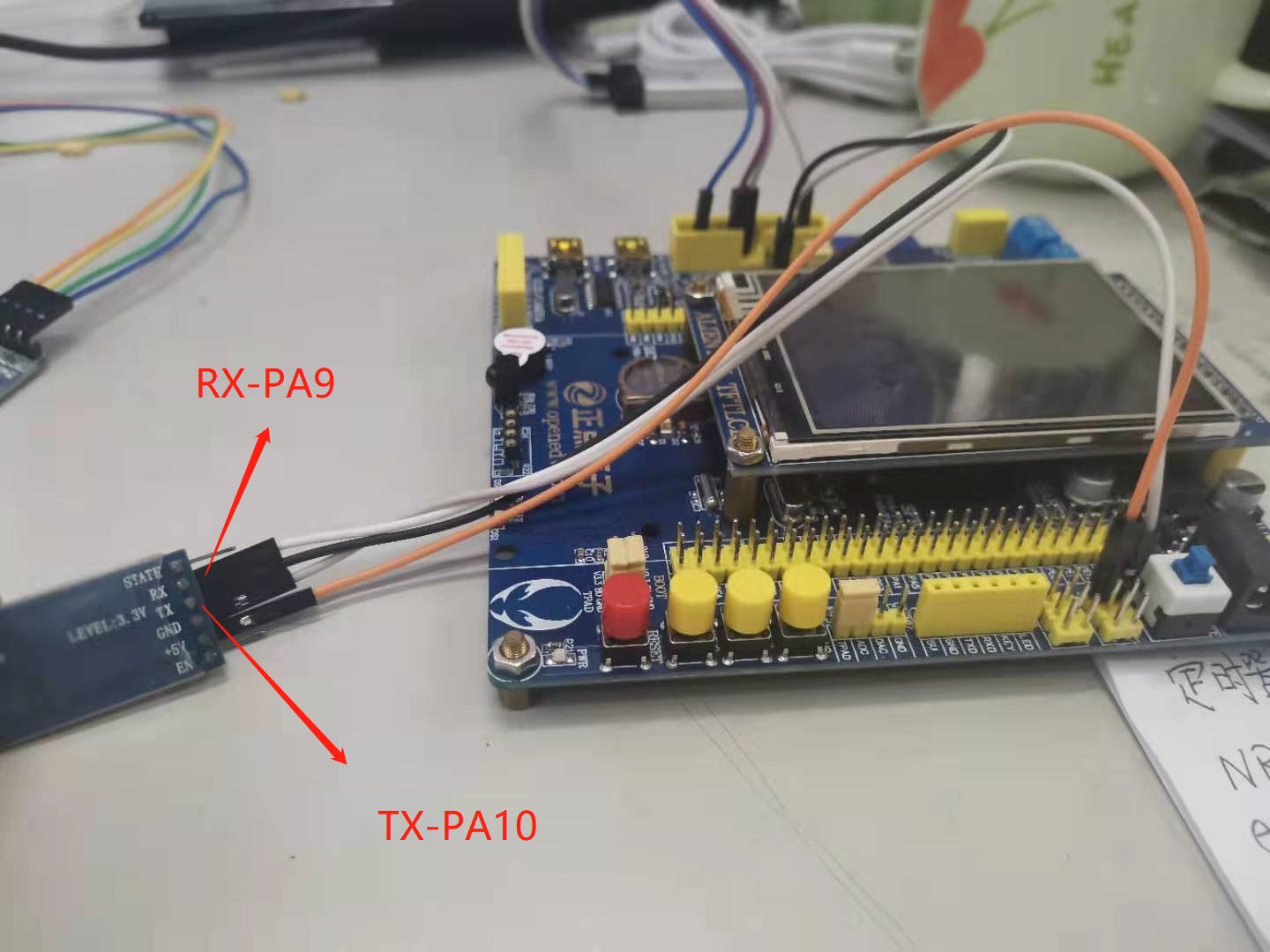
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //Multiplexed push-pull output
GPIO_Init(GPIOA, &GPIO_InitStructure);//Initialize gpioa nine
//USART1_RX GPIOA.10 initialization
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//Floating input
GPIO_Init(GPIOA, &GPIO_InitStructure);//Initialize gpioa ten
//Usart1 NVIC configuration
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//Preemption priority 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //Sub priority 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ channel enable
NVIC_Init(&NVIC_InitStructure); //Initializes the VIC register according to the specified parameters
//USART initialization settings
USART_InitStructure.USART_BaudRate = bound;//Serial baud rate
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//The word length is in 8-bit data format
USART_InitStructure.USART_StopBits = USART_StopBits_1;//A stop bit
USART_InitStructure.USART_Parity = USART_Parity_No;//No parity bit
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//No hardware data flow control
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //Transceiver mode
USART_Init(USART1, &USART_InitStructure); //Initialize serial port 1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//Open serial port to accept interrupt
USART_Cmd(USART1, ENABLE); //Enable serial port 1
}
void USART1_IRQHandler(void) //Serial port 1 interrupt service program
{
u8 Res;
// static u8 i =0;
#if SYSTEM_SUPPORT_OS // If system_ SUPPORT_ If OS is true, you need to support OS
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //Receive interrupt (the received data must end in 0x0D and 0x0a)
{
Res =USART_ReceiveData(USART1); //Read received data
// USART_SendData(USART1,Res);
if((USART_RX_STA&0x8000)==0)//Reception incomplete
{
if(USART_RX_STA&0x4000)//0x0d received
{
if(Res!=0x0a)USART_RX_STA=0;//Receive error, restart
else USART_RX_STA|=0x8000; //Reception is complete
}
else //I haven't received 0X0D yet
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//Error receiving data, restart receiving
}
}
}
}
#if SYSTEM_SUPPORT_OS // If system_ SUPPORT_ If OS is true, you need to support OS
OSIntExit();
#endif
}
usart.h configuration
#ifndef __USART_H #define __USART_H #include "stdio.h" #include "sys.h" #define USART_REC_LEN two hundred // Define the maximum number of bytes received 200 #define EN_USART1_RX one // Enable (1) / disable (0) serial port 1 reception extern u8 USART_RX_BUF[USART_REC_LEN]; //Receive buffer, maximum USART_REC_LEN bytes The last byte is a newline character extern u16 USART_RX_STA; //Receive status flag void uart1_init(u32 bound); #endif
main.c configuration
#include "sys.h"
#include "delay.h"
#include "usart.h"
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//Set the interrupt priority group as 2: 2-bit preemption priority and 2-bit response priority
delay_init(); //Delay function initialization
uart1_init(38400); //The baud rate of Bluetooth serial port is initialized to 38400
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//Get the length of the data received this time
printf("\r\n The message you sent is:\r\n\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART1, USART_RX_BUF[t]);//Send data to serial port 1
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//Wait for sending to end
}
printf("\r\n\r\n");//Insert wrap
USART_RX_STA=0;
}
}
}
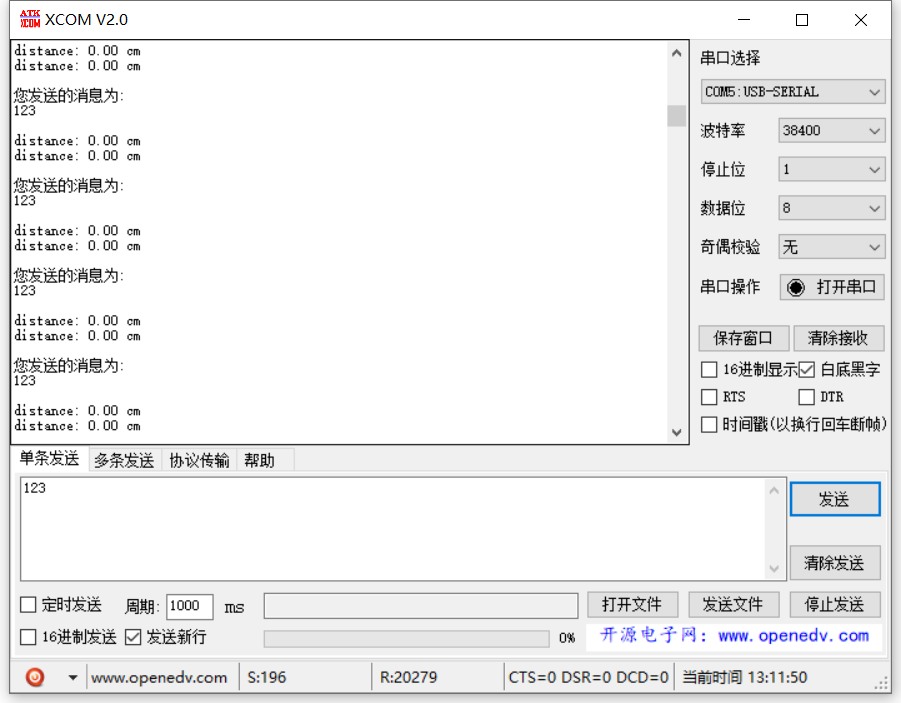
result
Power on the two Bluetooth and observe the flashing light. Both of them enter the automatic connection working mode. At the computer end, you can see the data sent back by stm32 through the serial port to the Bluetooth at the computer end. And tested the serial port interrupt, there is no problem.
Reference blog:
https://yngzmiao.blog.csdn.net/article/details/80368485
https://blog.csdn.net/seek97/article/details/81333701