0 Introduction
Recently, I'm learning slam mapping. I want to try to use Dajiang mid40 and loam_livox was used to build the drawing. In the whole process, there were many pits. The system was reinstalled five or six times. Fortunately, the system was mirrored before trying.
This algorithm does not need odometer, and can build map in real time by using real-time point cloud information released by lidar or recorded bag package.
loam_ Ceres needs to be installed for livox drawing_ solver,eigen3,pcl1.9. Personally, the most difficult part is here. The official PCL version is given. You need to use the PCL 1.0 that comes with Ubuntu 16 7 upgrade to pcl1 9, and ceres_slover and eigen3 versions are not given. If the versions do not correspond, they cannot be compiled successfully. After looking for them for most of the time, they finally found that Ceres was installed_ slover1. 14.0 and eigen3 3.7 can run through the algorithm. When I use cartographer to create drawings in slam, I install ceres_slover1.11.0 and eigen3 2.92. Using the normal installation method, only one of the two can run, so it took a lot of time to study the problem of multi version compatibility.
Now the whole process is recorded for your reference.
1 source code download
1. Loam_ Workspace created by livox
mkdir -p ~/loam_ws/src cd ~/loam_ws/src catkin_init_workspace
2.loam_livox Download
git clone https://github.com/hku-mars/loam_livox.git
3. Installation dependency
sudo apt-get install ros-kinetic-cv-bridge ros-kinetic-tf ros-kinetic-message-filters ros-kinetic-image-transport
2 eigen3.3.7 installation
1. Source code download
Download the compressed package from the following website and unzip it to the home directory
https://gitlab.com/libeigen/eigen/-/tree/3.3.7
2. Compilation
Using the normal compilation method, the eigen will be compiled to / usr/local/include, and this directory already has the previously installed eigen3 2.92, so it needs to be installed in its own designated directory.
cd ~/eigen-3.3.7 mkdir build mkdir eigen_loam
subsequently
cd build cmake -DCMAKE_INSTALL_PREFIX="/home/lww/eigen-3.3.7/eigen_loam/" ..
Note: here, the build folder is used to store the files generated by compilation, which is called eigen_loam is used as the installation location of eigen
make sudo make install
Installation succeeded
The eigen is found_ There is an eigen3 file under the include file in the loam folder. Copy it, rename it eigen337, and then copy it to / usr/local/include /
cd ~/eigen-3.3.7/eigen_loam/include sudo cp -R eigen337 /usr/local/include/
At this point, eigen3 3.7 successful installation
3 ceres_slover1.14.0 installation
1. Source code download
Download the compressed package from github and unzip it to the home directory
https://github.com/ceres-solver/ceres-solver/releases/tag/1.14.0
2. Compilation
cd ~/ceres-solver-1.14.0 mkdir build mkdir cere_loam
Since cere-solver-1.14 0 must depend on eigen3 3.7, cannot use eigen3 2.92 compilation, and eigen3.0 is installed in the default directory 2.92, so you need to specify eigen3.0 for ceres 3.7 installation directory. We have set eigen3 3.7 copy it to / usr/local/include and modify the path.
2.1 modify cmakelists Txt file
sudo gedit CMakeLists.txt
In find_ Add before package (eigen required)
set(EIGEN_DIR /usr/local/include/eigen337)
2.2 modify findeigen cmake
cd cmake sudo gedit FindEigen.cmake
The modification is as follows, compared with the reference of the original document:
# Ceres Solver - A fast non-linear least squares minimizer
# Copyright 2015 Google Inc. All rights reserved.
# http://ceres-solver.org/
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
#
# * Redistributions of source code must retain the above copyright notice,
# this list of conditions and the following disclaimer.
# * Redistributions in binary form must reproduce the above copyright notice,
# this list of conditions and the following disclaimer in the documentation
# and/or other materials provided with the distribution.
# * Neither the name of Google Inc. nor the names of its contributors may be
# used to endorse or promote products derived from this software without
# specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
# AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
# IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
# ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
# LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
# CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
# SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
# INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
# CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
# ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
# Author: alexs.mac@gmail.com (Alex Stewart)
#
# FindEigen.cmake - Find Eigen library, version >= 3.
#
# This module defines the following variables:
#
# EIGEN_FOUND: TRUE iff Eigen is found.
# EIGEN_INCLUDE_DIRS: Include directories for Eigen.
# EIGEN_VERSION: Extracted from Eigen/src/Core/util/Macros.h
# EIGEN_WORLD_VERSION: Equal to 3 if EIGEN_VERSION = 3.2.0
# EIGEN_MAJOR_VERSION: Equal to 2 if EIGEN_VERSION = 3.2.0
# EIGEN_MINOR_VERSION: Equal to 0 if EIGEN_VERSION = 3.2.0
# FOUND_INSTALLED_EIGEN_CMAKE_CONFIGURATION: True iff the version of Eigen
# found was built & installed /
# exported as a CMake package.
#
# The following variables control the behaviour of this module:
#
# EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION: TRUE/FALSE, iff TRUE then
# then prefer using an exported CMake configuration
# generated by Eigen over searching for the
# Eigen components manually. Otherwise (FALSE)
# ignore any exported Eigen CMake configurations and
# always perform a manual search for the components.
# Default: TRUE iff user does not define this variable
# before we are called, and does NOT specify
# EIGEN_INCLUDE_DIR_HINTS, otherwise FALSE.
# EIGEN_INCLUDE_DIR_HINTS: List of additional directories in which to
# search for eigen includes, e.g: /timbuktu/eigen3.
#
# The following variables are also defined by this module, but in line with
# CMake recommended FindPackage() module style should NOT be referenced directly
# by callers (use the plural variables detailed above instead). These variables
# do however affect the behaviour of the module via FIND_[PATH/LIBRARY]() which
# are NOT re-called (i.e. search for library is not repeated) if these variables
# are set with valid values _in the CMake cache_. This means that if these
# variables are set directly in the cache, either by the user in the CMake GUI,
# or by the user passing -DVAR=VALUE directives to CMake when called (which
# explicitly defines a cache variable), then they will be used verbatim,
# bypassing the HINTS variables and other hard-coded search locations.
#
# EIGEN_INCLUDE_DIR: Include directory for CXSparse, not including the
# include directory of any dependencies.
# Called if we failed to find Eigen or any of it's required dependencies,
# unsets all public (designed to be used externally) variables and reports
# error message at priority depending upon [REQUIRED/QUIET/<NONE>] argument.
macro(EIGEN_REPORT_NOT_FOUND REASON_MSG)
unset(EIGEN_FOUND)
unset(EIGEN_INCLUDE_DIRS)
unset(FOUND_INSTALLED_EIGEN_CMAKE_CONFIGURATION)
# Make results of search visible in the CMake GUI if Eigen has not
# been found so that user does not have to toggle to advanced view.
mark_as_advanced(CLEAR EIGEN_INCLUDE_DIR)
# Note <package>_FIND_[REQUIRED/QUIETLY] variables defined by FindPackage()
# use the camelcase library name, not uppercase.
if (Eigen_FIND_QUIETLY)
message(STATUS "Failed to find Eigen - " ${REASON_MSG} ${ARGN})
elseif (Eigen_FIND_REQUIRED)
message(FATAL_ERROR "Failed to find Eigen - " ${REASON_MSG} ${ARGN})
else()
# Neither QUIETLY nor REQUIRED, use no priority which emits a message
# but continues configuration and allows generation.
message("-- Failed to find Eigen - " ${REASON_MSG} ${ARGN})
endif ()
return()
endmacro(EIGEN_REPORT_NOT_FOUND)
# Protect against any alternative find_package scripts for this library having
# been called previously (in a client project) which set EIGEN_FOUND, but not
# the other variables we require / set here which could cause the search logic
# here to fail.
unset(EIGEN_FOUND)
# -----------------------------------------------------------------
# By default, if the user has expressed no preference for using an exported
# Eigen CMake configuration over performing a search for the installed
# components, and has not specified any hints for the search locations, then
# prefer an exported configuration if available.
if (NOT DEFINED EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION
AND NOT EIGEN_INCLUDE_DIR_HINTS)
message(STATUS "No preference for use of exported Eigen CMake configuration "
"set, and no hints for include directory provided. "
"Defaulting to preferring an installed/exported Eigen CMake configuration "
"if available.")
set(EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION TRUE)
endif()
if (EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION)
# Try to find an exported CMake configuration for Eigen.
#
# We search twice, s/t we can invert the ordering of precedence used by
# find_package() for exported package build directories, and installed
# packages (found via CMAKE_SYSTEM_PREFIX_PATH), listed as items 6) and 7)
# respectively in [1].
#
# By default, exported build directories are (in theory) detected first, and
# this is usually the case on Windows. However, on OS X & Linux, the install
# path (/usr/local) is typically present in the PATH environment variable
# which is checked in item 4) in [1] (i.e. before both of the above, unless
# NO_SYSTEM_ENVIRONMENT_PATH is passed). As such on those OSs installed
# packages are usually detected in preference to exported package build
# directories.
#
# To ensure a more consistent response across all OSs, and as users usually
# want to prefer an installed version of a package over a locally built one
# where both exist (esp. as the exported build directory might be removed
# after installation), we first search with NO_CMAKE_PACKAGE_REGISTRY which
# means any build directories exported by the user are ignored, and thus
# installed directories are preferred. If this fails to find the package
# we then research again, but without NO_CMAKE_PACKAGE_REGISTRY, so any
# exported build directories will now be detected.
#
# To prevent confusion on Windows, we also pass NO_CMAKE_BUILDS_PATH (which
# is item 5) in [1]), to not preferentially use projects that were built
# recently with the CMake GUI to ensure that we always prefer an installed
# version if available.
#
# [1] http://www.cmake.org/cmake/help/v2.8.11/cmake.html#command:find_package
find_package(Eigen3 QUIET
NO_MODULE
NO_CMAKE_PACKAGE_REGISTRY
NO_CMAKE_BUILDS_PATH)
if (EIGEN3_FOUND)
message(STATUS "Found installed version of Eigen: ${Eigen3_DIR}")
else()
# Failed to find an installed version of Eigen, repeat search allowing
# exported build directories.
message(STATUS "Failed to find installed Eigen CMake configuration, "
"searching for Eigen build directories exported with CMake.")
# Again pass NO_CMAKE_BUILDS_PATH, as we know that Eigen is exported and
# do not want to treat projects built with the CMake GUI preferentially.
find_package(Eigen3 QUIET
NO_MODULE
NO_CMAKE_BUILDS_PATH)
if (EIGEN3_FOUND)
message(STATUS "Found exported Eigen build directory: ${Eigen3_DIR}")
endif()
endif()
if (EIGEN3_FOUND)
set(FOUND_INSTALLED_EIGEN_CMAKE_CONFIGURATION TRUE)
set(EIGEN_FOUND ${EIGEN3_FOUND})
set(EIGEN_INCLUDE_DIR "${EIGEN3_INCLUDE_DIR}" CACHE STRING
"Eigen include directory" FORCE)
else()
message(STATUS "Failed to find an installed/exported CMake configuration "
"for Eigen, will perform search for installed Eigen components.")
endif()
endif()
if (NOT EIGEN_FOUND)
# Search user-installed locations first, so that we prefer user installs
# to system installs where both exist.
list(APPEND EIGEN_CHECK_INCLUDE_DIRS
/usr/local/include
/usr/local/homebrew/include # Mac OS X
/opt/local/var/macports/software # Mac OS X.
/opt/local/include
/usr/include
/usr/local/include/eigen337)
# Additional suffixes to try appending to each search path.
list(APPEND EIGEN_CHECK_PATH_SUFFIXES
eigen3 # Default root directory for Eigen.
Eigen/include/eigen3 # Windows (for C:/Program Files prefix) < 3.3
Eigen3/include/eigen3 ) # Windows (for C:/Program Files prefix) >= 3.3
# Search supplied hint directories first if supplied.
find_path(EIGEN_INCLUDE_DIR
NAMES Eigen/Core
HINTS ${EIGEN_INCLUDE_DIR_HINTS}
PATHS $"/usr/local/include/eigen337"
PATH_SUFFIXES ${EIGEN_CHECK_PATH_SUFFIXES})
if (NOT EIGEN_INCLUDE_DIR OR
NOT EXISTS ${EIGEN_INCLUDE_DIR})
eigen_report_not_found(
"Could not find eigen3 include directory, set EIGEN_INCLUDE_DIR to "
"path to eigen3 include directory, e.g. /usr/local/include/eigen337.")
endif (NOT EIGEN_INCLUDE_DIR OR
NOT EXISTS ${EIGEN_INCLUDE_DIR})
# Mark internally as found, then verify. EIGEN_REPORT_NOT_FOUND() unsets
# if called.
set(EIGEN_FOUND TRUE)
endif()
# Extract Eigen version from Eigen/src/Core/util/Macros.h
if (EIGEN_INCLUDE_DIR)
set(EIGEN_VERSION_FILE /usr/local/include/eigen337/Eigen/src/Core/util/Macros.h)
if (NOT EXISTS ${EIGEN_VERSION_FILE})
eigen_report_not_found(
"Could not find file: ${EIGEN_VERSION_FILE} "
"containing version information in Eigen install located at: "
"${EIGEN_INCLUDE_DIR}.")
else (NOT EXISTS ${EIGEN_VERSION_FILE})
file(READ ${EIGEN_VERSION_FILE} EIGEN_VERSION_FILE_CONTENTS)
string(REGEX MATCH "#define EIGEN_WORLD_VERSION [0-9]+"
EIGEN_WORLD_VERSION "${EIGEN_VERSION_FILE_CONTENTS}")
string(REGEX REPLACE "#define EIGEN_WORLD_VERSION ([0-9]+)" "\\1"
EIGEN_WORLD_VERSION "${EIGEN_WORLD_VERSION}")
string(REGEX MATCH "#define EIGEN_MAJOR_VERSION [0-9]+"
EIGEN_MAJOR_VERSION "${EIGEN_VERSION_FILE_CONTENTS}")
string(REGEX REPLACE "#define EIGEN_MAJOR_VERSION ([0-9]+)" "\\1"
EIGEN_MAJOR_VERSION "${EIGEN_MAJOR_VERSION}")
string(REGEX MATCH "#define EIGEN_MINOR_VERSION [0-9]+"
EIGEN_MINOR_VERSION "${EIGEN_VERSION_FILE_CONTENTS}")
string(REGEX REPLACE "#define EIGEN_MINOR_VERSION ([0-9]+)" "\\1"
EIGEN_MINOR_VERSION "${EIGEN_MINOR_VERSION}")
# This is on a single line s/t CMake does not interpret it as a list of
# elements and insert ';' separators which would result in 3.;2.;0 nonsense.
set(EIGEN_VERSION "${EIGEN_WORLD_VERSION}.${EIGEN_MAJOR_VERSION}.${EIGEN_MINOR_VERSION}")
endif (NOT EXISTS ${EIGEN_VERSION_FILE})
endif (EIGEN_INCLUDE_DIR)
# Set standard CMake FindPackage variables if found.
if (EIGEN_FOUND)
set(EIGEN_INCLUDE_DIRS ${EIGEN_INCLUDE_DIR})
endif (EIGEN_FOUND)
# Handle REQUIRED / QUIET optional arguments and version.
include(FindPackageHandleStandardArgs)
find_package_handle_standard_args(Eigen
REQUIRED_VARS EIGEN_INCLUDE_DIRS
VERSION_VAR EIGEN_VERSION)
# Only mark internal variables as advanced if we found Eigen, otherwise
# leave it visible in the standard GUI for the user to set manually.
if (EIGEN_FOUND)
mark_as_advanced(FORCE EIGEN_INCLUDE_DIR
Eigen3_DIR) # Autogenerated by find_package(Eigen3)
endif (EIGEN_FOUND)
2.3 compilation
cd ~/ceres-solver-1.14.0/build cmake -DCMAKE_INSTALL_PREFIX="/home/lww/ceres-solver-1.14.0/ceres_loam/" .. make -j4 sudo make install
Compilation succeeded
3 pcl1.9 installation
3.1 installation dependency
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.8 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk5.10-qt4 libvtk5.10 libvtk5-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre
3.2 source code download
Download the compressed package from github and unzip it to the home directory
https://github.com/PointCloudLibrary/pcl/releases
3.3 compilation
cd ~/pcl-pcl-1.9.0
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr \
-DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \
-DCMAKE_INSTALL_PREFIX=/usr ..
make -j4
sudo make install
Installation succeeded
4 loam_livox source code compilation
4.1 modify loam_ Cmakelists for livox Txt file
cd ~/loam_ws/src/loam_livox sudo gedit CMakeLists.txt
The parts to be modified are as follows:
find_package(Eigen3 REQUIRED) find_package(OpenCV REQUIRED) find_package(Ceres 1.14.0 REQUIRED PATHS /home/lww/ceres-solver-1.14.0/ceres_loam NO_DEFAULT_PATH) #find_package(Ceres REQUIRED) find_package(PCL 1.9 REQUIRED)
4.2 source code compilation
cd ~/loam_ws catkin_make
5 loam_livox trial run
5.1 download the official bag package
Download cyt from the link below_ 02.bag, put it in the main directory
https://drive.google.com/drive/folders/1HWomWWPSEVvka2QVB2G41iRvSwIt5NWf
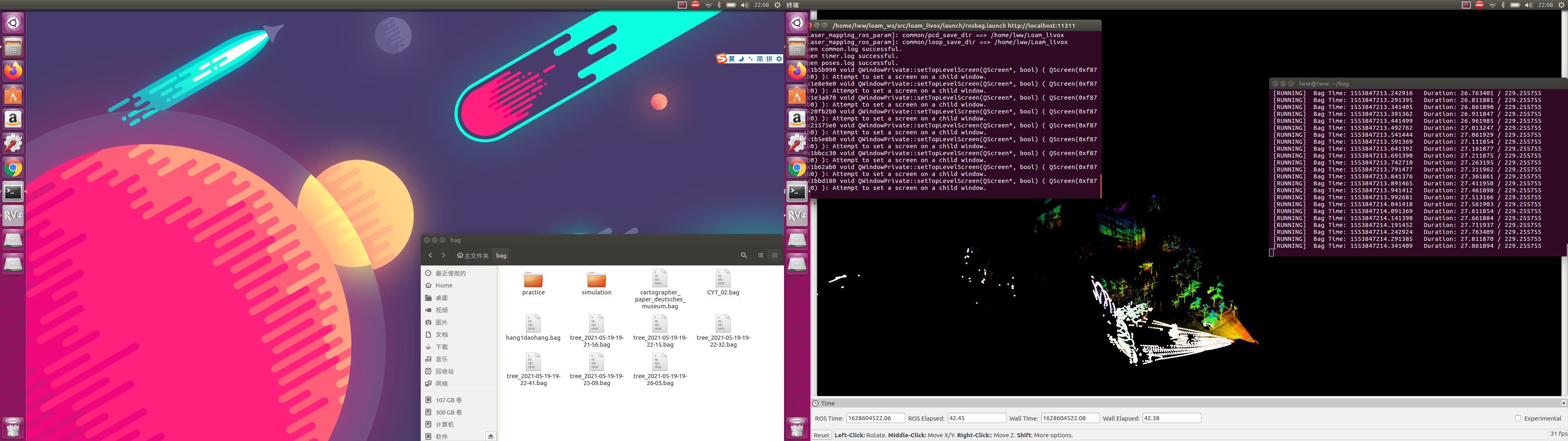
5.2 trial run
source ~/loam_ws/devel/setup.bash roslaunch loam_livox rosbag.launch
Another terminal
rosbag play CYT_02.bag
Map creation succeeded
You can test with your own recorded bag package