1. Introduction
1.1 Ant colony algorithm is a biomimetic algorithm that simulates the way ants find their way in the natural world: ants can leave pheromone substances on the path they travel for information transfer, and ants can perceive this substance and guide their direction of movement. The collective behavior of an ant colony composed of a large number of ants exhibits a positive feedback phenomenon: the more ants walk along a path, the greater the probability that subsequents will choose that path. Ant colony algorithm is a heuristic global optimization algorithm in evolutionary algorithm, which has the characteristics of distributed computing, positive feedback of information and heuristic search.
1.2 TSP Problem (Travel Salesman Problem)
The T S P problem can be expressed as a weighted complete graph G=(N,A), where N is a set with n=|N|points (cities) and A is a set of edges that fully connect these points. Each edge (i,j) belongs to A with a weight that represents the distance between city I and city J. The TSP problem is to find the shortest Hamilton circuit in the graph.
1. Build Diagram: Build Diagram and Problem Description Diagram are identical, the component's set C corresponds to the set of corresponding points (that is, C=N), the component's set C corresponds to the set of corresponding edges (that is, L=A), and each edge has a weight representing the distance between points i and j.
2. Restrictions: All cities must be visited and each city can only be visited at most once.
3. Pheromones and heuristic information: Pheromones in the TSP problem indicate the expectation of visiting city j directly after visiting city i. The heuristic information value is generally inversely proportional to the distance between city i and city j.
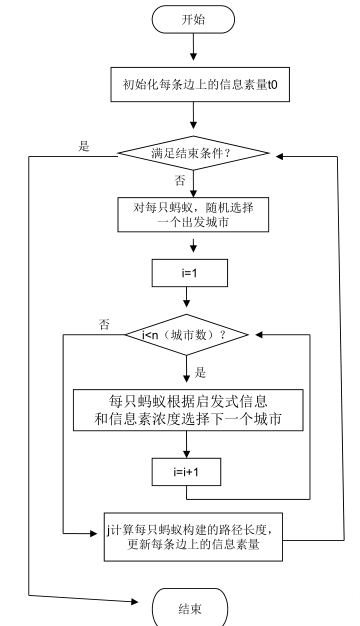
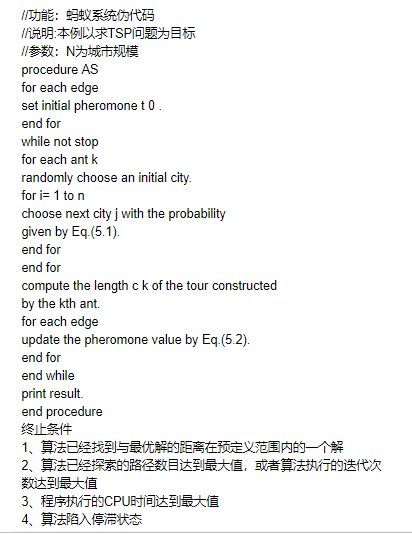
4. Solution construction: Each ant starts from a randomly selected city and adds a city to the solution that has not been visited after each iteration. When all the cities have been visited by ants, the construction of the solution terminates. 1.3 Implementation process and pseudocode
Source Code
function varargout = AntColonyVRPGUI(varargin)
% ANTCOLONYVRPGUI M-file for AntColonyVRPGUI.fig
% ANTCOLONYVRPGUI, by itself, creates a new ANTCOLONYVRPGUI or raises the existing
% singleton*.
%
% H = ANTCOLONYVRPGUI returns the handle to a new ANTCOLONYVRPGUI or the handle to
% the existing singleton*.
%
% ANTCOLONYVRPGUI('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in ANTCOLONYVRPGUI.M with the given input arguments.
%
% ANTCOLONYVRPGUI('Property','Value',...) creates a new ANTCOLONYVRPGUI or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before AntColonyVRPGUI_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to AntColonyVRPGUI_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help AntColonyVRPGUI
% Last Modified by GUIDE v2.5 11-Jun-2015 00:13:48
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @AntColonyVRPGUI_OpeningFcn, ...
'gui_OutputFcn', @AntColonyVRPGUI_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before AntColonyVRPGUI is made visible.
function AntColonyVRPGUI_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to AntColonyVRPGUI (see VARARGIN)
% Choose default command line output for AntColonyVRPGUI
handles.output = hObject;
%% change !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
handles.ismdvrp = true; %!!!
%%
if handles.ismdvrp == true
[handles.initClusters, handles.coordinates] = INIT;
handles.clusters = handles.initClusters;
set(handles.uipanelBases,'Visible','on');
create_init_plot_MDVRP(handles.coordinates, handles.clusters);
else
%initialization
[vehicles,demands,dist_stations,dist_bases] = INIT_VRP;
handles.vehicles = vehicles;
handles.demands = demands;
handles.distances_stations = dist_stations;
handles.distances_bases = dist_bases;
set(handles.uipanelBases,'Visible','off');
end
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes AntColonyVRPGUI wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = AntColonyVRPGUI_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on selection change in algorithmPopupmenu.
function algorithmPopupmenu_Callback(hObject, eventdata, handles)
% hObject handle to algorithmPopupmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = cellstr(get(hObject,'String')) returns algorithmPopupmenu contents as cell array
% contents{get(hObject,'Value')} returns selected item from algorithmPopupmenu
%set invisible error messages
set(handles.errorMandatoryEditFields,'Visible','off');
%erase text in edit fields
set(handles.evaporationPheromoneEdit,'String','');
set(handles.attractStationEdit,'String','');
set(handles.increasePheromoneEdit,'String','');
set(handles.amountPheromoneEdit,'String','');
set(handles.eliteAntsEdit,'String','');
%set disabled all edit fields
set(handles.evaporationPheromoneEdit,'Enable','off');
set(handles.attractStationEdit,'Enable','off');
set(handles.increasePheromoneEdit,'Enable','off');
set(handles.amountPheromoneEdit,'Enable','off');
set(handles.eliteAntsEdit,'Enable','off');
%set disabled run button
set(handles.runButton,'Enable','off');
%set to 0 all results
set(handles.lengthWayText,'String','-');
set(handles.subroutesNText,'String','-');
set(handles.timeSpentText,'String','-');
if handles.ismdvrp == true
%set invisible bases' listbox
set(handles.listboxBases,'Visible','off');
set(handles.totalLengthText,'Visible','off');
set(handles.totalLengthText,'String','-');
set(handles.totalLengthLabel,'Visible','off');
%clear plot
cla;
create_init_plot_MDVRP(handles.coordinates, handles.clusters);
end
%clear plot
%cla;
%clear legend
legend('off');
val = get(hObject,'Value');
if val ~= 1 %not placeholder's text (not be executed)
if val ~= 2 %not Clark-Wright algorithm
%enable edit fields
if val == 5 %AntAlg with elite ants
set(handles.eliteAntsEdit,'Enable','on');
end
set(handles.evaporationPheromoneEdit,'Enable','on');
set(handles.attractStationEdit,'Enable','on');
set(handles.increasePheromoneEdit,'Enable','on');
set(handles.amountPheromoneEdit,'Enable','on');
end
%enable run button
set(handles.runButton,'Enable','on');
end
% --- Executes during object creation, after setting all properties.
function algorithmPopupmenu_CreateFcn(hObject, eventdata, handles)
% hObject handle to algorithmPopupmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: popupmenu controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function evaporationPheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to evaporationPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of evaporationPheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of evaporationPheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function evaporationPheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to evaporationPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function attractStationEdit_Callback(hObject, eventdata, handles)
% hObject handle to attractStationEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of attractStationEdit as text
% str2double(get(hObject,'String')) returns contents of attractStationEdit as a double
% --- Executes during object creation, after setting all properties.
function attractStationEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to attractStationEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function increasePheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to increasePheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of increasePheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of increasePheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function increasePheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to increasePheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function amountPheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to amountPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of amountPheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of amountPheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function amountPheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to amountPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function eliteAntsEdit_Callback(hObject, eventdata, handles)
% hObject handle to eliteAntsEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of eliteAntsEdit as text
% str2double(get(hObject,'String')) returns contents of eliteAntsEdit as a double
% --- Executes during object creation, after setting all properties.
function eliteAntsEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to eliteAntsEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on button press in runButton.
function runButton_Callback(hObject, eventdata, handles)
% hObject handle to runButton (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%clear legend
legend('off');
%clear plot
%cla;
%set invisible error messages
set(handles.errorMandatoryEditFields,'Visible','off');
indexAlg = get(handles.algorithmPopupmenu,'Value');
if indexAlg ~= 1 %not placeholder's text (not be executed)
if indexAlg ~= 2 %not Clark-Wright algorithm
if indexAlg == 5 %AntAlg with elite ants
if isempty(get(handles.eliteAntsEdit,'String'))
set(handles.errorMandatoryEditFields,'Visible','on');
return;
end
end
if ( isempty(get(handles.evaporationPheromoneEdit,'String')) || ...
isempty(get(handles.attractStationEdit,'String')) || ...
isempty(get(handles.increasePheromoneEdit,'String')) || ...
isempty(get(handles.amountPheromoneEdit,'String')) )
set(handles.errorMandatoryEditFields,'Visible','on');
return;
end
end
%set disabled run button
set(handles.runButton,'Enable','off');
if handles.ismdvrp == true
clusters = runAlgorithmMDVRP(indexAlg, handles);
handles.clusters = clusters;
listbox=findall(gcf,'tag','listboxBases');
guidata(listbox,handles);
%select first value in bases' listbox
set(handles.listboxBases,'Value',1);
listboxBases_Callback(listbox, eventdata, handles);
else
runAlgorithmVRP(indexAlg, handles);
end
%set enabled run button
set(handles.runButton,'Enable','on');
%set enabled zoom tools
set(handles.toolZoomIn,'Enable','on');
set(handles.toolZoomOut,'Enable','on');
%set enabled pan tool
set(handles.toolPan,'Enable','on');
zoom reset;
end
function [clusters] = runAlgorithmMDVRP(index, handles)
if index ~= 1
if index ~= 2
e = str2double(get(handles.evaporationPheromoneEdit,'String'));
alpha = str2double(get(handles.attractStationEdit,'String'));
beta = str2double(get(handles.increasePheromoneEdit,'String'));
tau0 = str2double(get(handles.amountPheromoneEdit,'String'));
E = str2double(get(handles.eliteAntsEdit,'String'));
end
try
tStart = tic; %start spent time
clusters = handles.initClusters;
handles.clusters = clusters;
basesName = cell(1,length(clusters)+1);
basesName{1} = 'Full view';
for c = 1:length(clusters)
switch index
case 2 %Clark-Wright
[ Route, RouteLength, vehicles ] = Clark_Wright_VRP( ...
clusters(c).demands, clusters(c).diststations, ...
clusters(c).distbases, clusters(c).vehicles_capacity );
case 3 %Ant-minpath
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP_minpath( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0], clusters(c).vehicles_capacity );
case 4 %Ant-partition
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0], clusters(c).vehicles_capacity );
case 5 %Ant-elite ants
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP_with_elite_ants( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0 E], clusters(c).vehicles_capacity );
end
handles.clusters(c).mdvrp = changeStations(clusters, vehicles, RouteLength, Route, c);
basesName{c + 1} = sprintf('Base #%d',c); %saving bases that need to be added to listbox
end
tElapsed = toc(tStart); %end spent time
catch ME
msgbox(strcat('Error occured: ',ME.message),'Error','error');
end
clusters = handles.clusters;
%clear plot
cla;
create_plot_route_with_vehicles_MDVRP(handles.coordinates, handles.clusters);
set(handles.timeSpentText,'String',sprintf('%fs',tElapsed));
set(handles.listboxBases, 'String', basesName);
set(handles.listboxBases, 'Visible','on');
set(handles.totalLengthText,'String',num2str(getTotalLength(handles.clusters)));
set(handles.totalLengthText,'Visible','on');
set(handles.totalLengthLabel,'Visible','on');
end
function [mdvrp] = changeStations(clusters, vehicles, LR, R, clusterN)
mdvrp = struct('length_route',[],'vehicles',[],'simpleVehicles',[],'num_of_subroutes',[]);
len = length(vehicles);
mdvrp.simpleVehicles = vehicles;
for v = 1:len
vehicles(v).route(vehicles(v).route == 1) = 0;
len_route = length(vehicles(v).route);
for vr = 1:len_route
if vehicles(v).route(vr) ~= 0 %Roaming around
vehicles(v).route(vr) = clusters(clusterN).stations(vehicles(v).route(vr)-1);
end
end
end
mdvrp.num_of_subroutes = number_of_subroutes(R);
mdvrp.length_route = LR;
mdvrp.vehicles = vehicles;
function [tlength] = getTotalLength(clusters)
tlength = 0;
clen = length(clusters);
for c = 1:clen
tlength = tlength + clusters(c).mdvrp.length_route;
end
function runAlgorithmVRP(index, handles)
if index ~= 1
if index ~= 2
e = str2double(get(handles.evaporationPheromoneEdit,'String'));
alpha = str2double(get(handles.attractStationEdit,'String'));
beta = str2double(get(handles.increasePheromoneEdit,'String'));
tau0 = str2double(get(handles.amountPheromoneEdit,'String'));
E = str2double(get(handles.eliteAntsEdit,'String'));
end
try
tStart = tic; %start spent time
switch index
case 2 %Clark-Wright
[Route,RouteLength,vehicles] = Clark_Wright_VRP( handles.demands, ...
handles.distances_stations, handles.distances_bases, handles.vehicles );
case 3 %Ant-minpath
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP_minpath( handles.distances_stations,...
handles.distances_bases, handles.demands, [e alpha beta tau0], handles.vehicles);
case 4 %Ant-partition
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP( handles.distances_stations, ...
handles.distances_bases, handles.demands, [e alpha beta tau0], handles.vehicles);
case 5 %Ant-elite ants
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP_with_elite_ants( ...
handles.distances_stations, handles.distances_bases, handles.demands, ...
[e alpha beta tau0 E], handles.vehicles);
end
tElapsed = toc(tStart); %end spent time
create_plot_route_with_vehicles( add_bases_to_distances(handles.distances_stations, ...
handles.distances_bases), vehicles, [0 handles.demands] );
catch ME
msgbox(strcat('Error occured: ',ME.message),'Error','error');
end
set(handles.lengthWayText,'String',num2str(RouteLength));
set(handles.subroutesNText,'String',num2str(number_of_subroutes(Route)));
set(handles.timeSpentText,'String',sprintf('%fs',tElapsed));
end
% --------------------------------------------------------------------
function dataTooltip_ClickedCallback(hObject, eventdata, handles)
% hObject handle to dataTooltip (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function algorithmTooltip_ClickedCallback(hObject, eventdata, handles)
% hObject handle to algorithmTooltip (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on selection change in listboxBases.
function listboxBases_Callback(hObject, eventdata, handles)
% hObject handle to listboxBases (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = cellstr(get(hObject,'String')) returns listboxBases contents as cell array
% contents{get(hObject,'Value')} returns selected item from listboxBases
%clear legend
legend('off');
%clear plot
cla;
index = get(handles.listboxBases,'value') - 1;
if index == 0 %if user want to see the full graph of routes
create_plot_route_with_vehicles_MDVRP(handles.coordinates, handles.clusters);
set(handles.lengthWayText,'String','-');
set(handles.subroutesNText,'String','-');
else
create_plot_of_base_MDVRP(handles.coordinates, handles.clusters, index);
set(handles.lengthWayText,'String',num2str(handles.clusters(index).mdvrp.length_route));
set(handles.subroutesNText,'String',num2str(handles.clusters(index).mdvrp.num_of_subroutes));
end
% --- Executes during object creation, after setting all properties.
function listboxBases_CreateFcn(hObject, eventdata, handles)
% hObject handle to listboxBases (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: listbox controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --------------------------------------------------------------------
function aboutMenu_Callback(hObject, eventdata, handles)
% hObject handle to aboutMenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
About %call gui About.m
% --------------------------------------------------------------------
function fileMenu_Callback(hObject, eventdata, handles)
% hObject handle to fileMenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function anotherVRPSubmenu_Callback(hObject, eventdata, handles)
% hObject handle to anotherVRPSubmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function newDataSubmenu_Callback(hObject, eventdata, handles)
% hObject handle to newDataSubmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
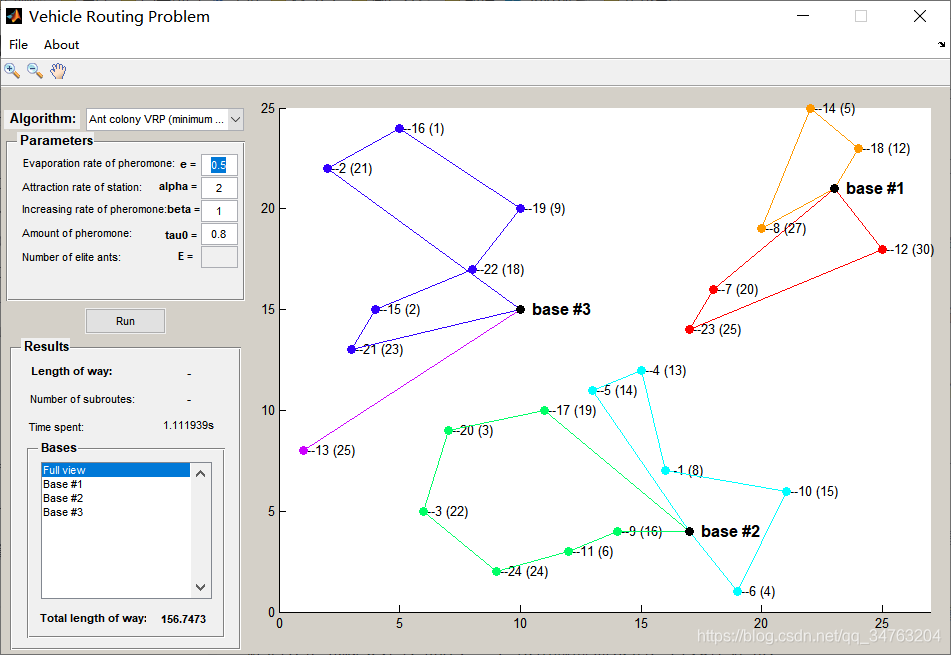
3. Operation results
4. Remarks
Version: 2014 a