This case comes from the official example of ML agents, Github address: https://github.com/Unity-Technologies/ml-agents , this article is a detailed supporting explanation.
Based on my previous two articles, I need to know about ml agents. For details, see: The use of ML agents in Unity reinforcement learning,Ml agents command and configuration.
My previous related articles are:
Push box game in ML agents case
Ml agents case wall jumping game
Food collectors in ML agents case
Double football in ML agents case
Unity artificial intelligence: a self evolving five player football game
Dungeon Escape in ML agents case
Robot walking in ML agents case
Map matching of ML agents case
Environmental description
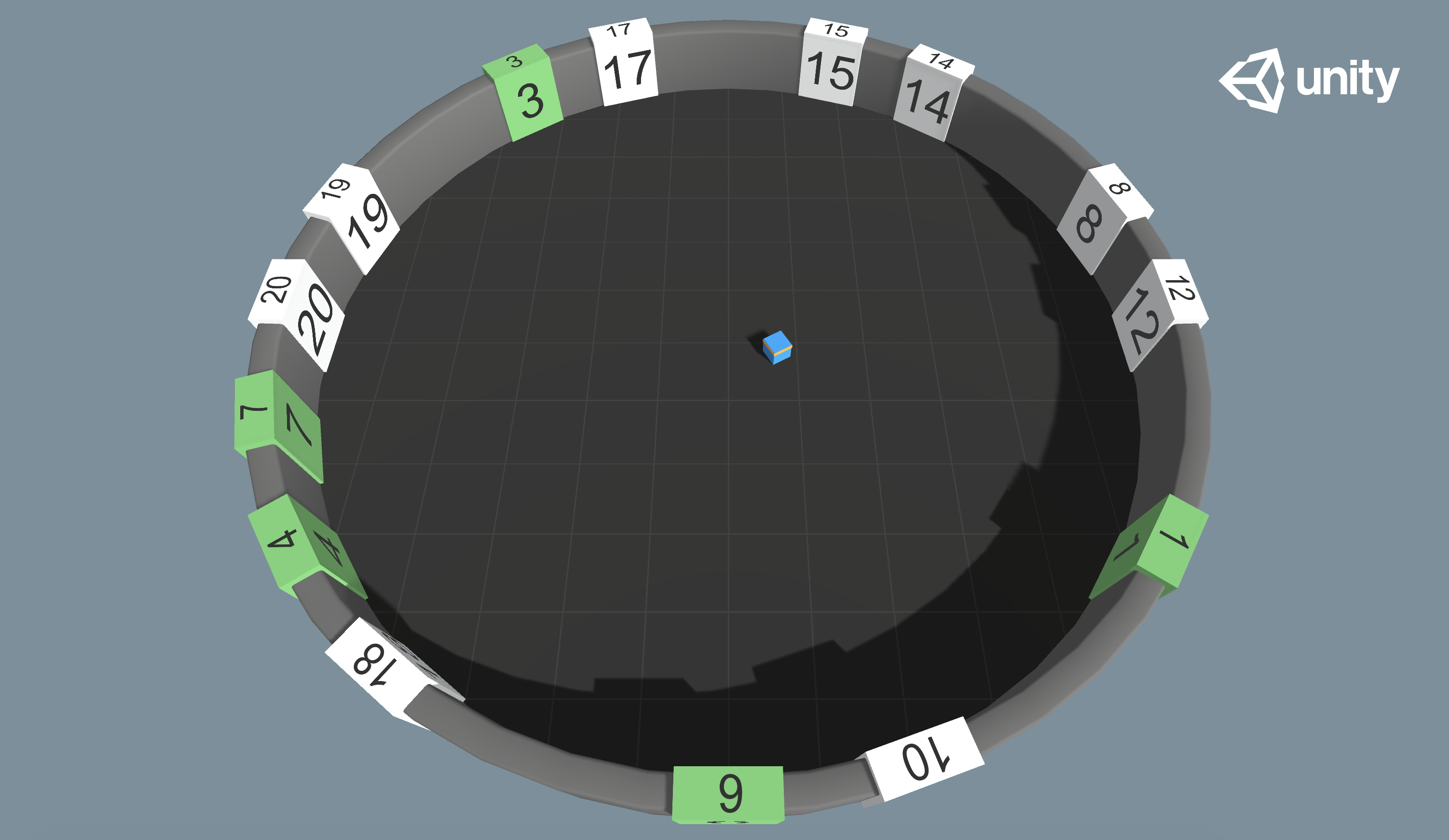
As shown in the figure, when the agent is in a circular room, the box with numbers will appear randomly on the wall. The agent needs to collide with the box from small to large, and the collided box will turn green with a score of + 1. Once the collision order is wrong, the game ends with a score of - 1.
The challenge of this case is that we will not tell the agent how to sort correctly. The agent needs to try and make mistakes in the environment, so as to learn the behavior mode of sorting from small to large and colliding with the corresponding blocks. At the same time, the number of digital blocks on the wall is uncertain, that is, we need to receive different numbers of inputs for each episode, How should this be handled?
Status input: a new sensor Buffer Sensor is used here.
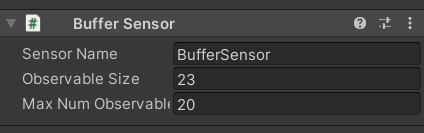
The function of this sensor is to receive the status input of number change. We need to pass in one vector at a time, which can be represented by the array listObservation. Through m_BufferSensor.AppendObservation(listObservation) is passed into the buffersensor, which can receive countless such vector inputs, but the dimension of each vector must be the same. In other words, even if the number of vectors we input is different every time, we can train the network to produce the desired output. The specific implementation is not in the project code. It is integrated in the ML agents package. According to my experience, the network structure of self attention should be used to receive the input of different number vectors.
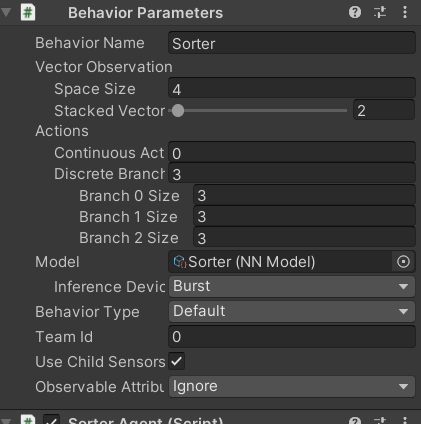
In addition to the input to the BufferSensor, four-dimensional vectors are also introduced, which are the components of the vector from the agent's position to the center of the site on the x-axis and z-axis, and the components of the agent's forward direction on the x-axis and z-axis.
Action output: three discrete values are output. Each discrete value contains three numbers of 0-2. The first discrete value determines the forward and backward, the second discrete value determines the left shift and right shift, and the third discrete value determines the left turn and right turn.
Code explanation
The scripts attached to the agent include the decision requester, model override, Behavior Parameters, and the Buffer Sensor described just now. Only the agent file sorteragent is left The following:
Header file:
using System.Collections.Generic; using UnityEngine; using Unity.MLAgents; using Unity.MLAgents.Actuators; using Unity.MLAgents.Sensors; using Random = UnityEngine.Random;
Define variables:
// The maximum number of default number squares can be adjusted by sliding in the editor. The adjustment range is 1 - 20 [Range(1, 20)] public int DefaultMaxNumTiles; // Maximum number of squares private const int k_HighestTileValue = 20; // Number of generated blocks int m_NumberOfTilesToSpawn; // Maximum number of squares int m_MaxNumberOfTiles; // rigid body Rigidbody m_AgentRb; // BufferSensorComponent is a sensor that allows you to observe a different number of inputs BufferSensorComponent m_BufferSensor; // List of numeric squares public List<NumberTile> NumberTilesList = new List<NumberTile>(); // List of squares that appear in the scene private List<NumberTile> CurrentlyVisibleTilesList = new List<NumberTile>(); // List of squares that have been touched private List<Transform> AlreadyTouchedList = new List<Transform>(); private List<int> m_UsedPositionsList = new List<int>(); // initial position private Vector3 m_StartingPos; // Whole scene GameObject m_Area; // Environment parameters, which can be obtained from the configuration file EnvironmentParameters m_ResetParams; // The index of the next digit box you want to collide with private int m_NextExpectedTileIndex;
Initialization method Initialize():
public override void Initialize()
{
// Get parent object
m_Area = transform.parent.gameObject;
// Gets the maximum number of squares
m_MaxNumberOfTiles = k_HighestTileValue;
// Get environment parameters from configuration file
m_ResetParams = Academy.Instance.EnvironmentParameters;
// Get sensor script
m_BufferSensor = GetComponent<BufferSensorComponent>();
// Get rigid body
m_AgentRb = GetComponent<Rigidbody>();
// Starting position
m_StartingPos = transform.position;
}
Status input method:
public override void CollectObservations(VectorSensor sensor)
{
// Get the distance from the agent to the center of the site on the x-axis and z-axis
sensor.AddObservation((transform.position.x - m_Area.transform.position.x) / 20f);
sensor.AddObservation((transform.position.z - m_Area.transform.position.z) / 20f);
// Obtain the values of x-axis and z-axis of the forward direction of the agent
sensor.AddObservation(transform.forward.x);
sensor.AddObservation(transform.forward.z);
foreach (var item in CurrentlyVisibleTilesList)
{
// Define an array to store a series of observations. The length of the array is the maximum number of digital squares + 3. The default initialization is 0
float[] listObservation = new float[k_HighestTileValue + 3];
// Get the number of blocks and set the corresponding one hot vector
listObservation[item.NumberValue] = 1.0f;
// Obtain the coordinates of the block (the sub object coordinates are the real coordinates, and the position of the transform itself is kept in the center of the scene to facilitate rotation)
var tileTransform = item.transform.GetChild(1);
// Enter the x and z components of the digital block and the agent
listObservation[k_HighestTileValue] = (tileTransform.position.x - transform.position.x) / 20f;
listObservation[k_HighestTileValue + 1] = (tileTransform.position.z - transform.position.z) / 20f;
// Has the square been collided
listObservation[k_HighestTileValue + 2] = item.IsVisited ? 1.0f : 0.0f;
// Add the array to the Buffer Sensor (the reason why it is not directly input to the network is that the number of arrays to be added varies)
m_BufferSensor.AppendObservation(listObservation);
}
}
Action output method OnActionReceived:
public override void OnActionReceived(ActionBuffers actionBuffers)
{
// Mobile agent
MoveAgent(actionBuffers.DiscreteActions);
// Time penalty, encourage the agent to complete as soon as possible
AddReward(-1f / MaxStep);
}
public void MoveAgent(ActionSegment<int> act)
{
var dirToGo = Vector3.zero;
var rotateDir = Vector3.zero;
// Three discrete outputs of neural network are obtained
var forwardAxis = act[0];
var rightAxis = act[1];
var rotateAxis = act[2];
// The first discrete output determines forward and backward
switch (forwardAxis)
{
case 1:
dirToGo = transform.forward * 1f;
break;
case 2:
dirToGo = transform.forward * -1f;
break;
}
// The second discrete output determines the shift from left to right
switch (rightAxis)
{
case 1:
dirToGo = transform.right * 1f;
break;
case 2:
dirToGo = transform.right * -1f;
break;
}
// The third discrete output determines the left turn and the right turn
switch (rotateAxis)
{
case 1:
rotateDir = transform.up * -1f;
break;
case 2:
rotateDir = transform.up * 1f;
break;
}
// Execute action
transform.Rotate(rotateDir, Time.deltaTime * 200f);
m_AgentRb.AddForce(dirToGo * 2, ForceMode.VelocityChange);
}
The method OnEpisodeBegin executed at the beginning of each episode (turn):
public override void OnEpisodeBegin()
{
// Get the number of blocks from the configuration file. If not, set it to DefaultMaxNumTiles
m_MaxNumberOfTiles = (int)m_ResetParams.GetWithDefault("num_tiles", DefaultMaxNumTiles);
// Number of randomly generated blocks
m_NumberOfTilesToSpawn = Random.Range(1, m_MaxNumberOfTiles + 1);
// Select the corresponding box to be generated and add it to the list
SelectTilesToShow();
// Generate blocks and adjust positions
SetTilePositions();
transform.position = m_StartingPos;
m_AgentRb.velocity = Vector3.zero;
m_AgentRb.angularVelocity = Vector3.zero;
}
void SelectTilesToShow()
{
// Clear both lists
CurrentlyVisibleTilesList.Clear();
AlreadyTouchedList.Clear();
// A total of nunLeft squares are generated
int numLeft = m_NumberOfTilesToSpawn;
while (numLeft > 0)
{
// Take random numbers in the range to generate corresponding blocks
int rndInt = Random.Range(0, k_HighestTileValue);
var tmp = NumberTilesList[rndInt];
// If the corresponding box is not in the list, add it
if (!CurrentlyVisibleTilesList.Contains(tmp))
{
CurrentlyVisibleTilesList.Add(tmp);
numLeft--;
}
}
// Sort the list of squares in ascending numerical order
CurrentlyVisibleTilesList.Sort((x, y) => x.NumberValue.CompareTo(y.NumberValue));
m_NextExpectedTileIndex = 0;
}
void SetTilePositions()
{
// clear list
m_UsedPositionsList.Clear();
// Reset the state of all blocks. The ResetTile method can be seen in the script of the number block
foreach (var item in NumberTilesList)
{
item.ResetTile();
item.gameObject.SetActive(false);
}
foreach (var item in CurrentlyVisibleTilesList)
{
bool posChosen = false;
// rndPosIndx determines the rotation angle of our square (i.e. where in the circular field)
int rndPosIndx = 0;
while (!posChosen)
{
rndPosIndx = Random.Range(0, k_HighestTileValue);
// Is this rotation angle selected? If not, it will be added to the list
if (!m_UsedPositionsList.Contains(rndPosIndx))
{
m_UsedPositionsList.Add(rndPosIndx);
posChosen = true;
}
}
// Performs a rotation of the square angle and activates the object
item.transform.localRotation = Quaternion.Euler(0, rndPosIndx * (360f / k_HighestTileValue), 0);
item.gameObject.SetActive(true);
}
}
When collision with other objects begins, execute the method OnCollisionEnter:
private void OnCollisionEnter(Collision col)
{
// Only collision with the number box is detected
if (!col.gameObject.CompareTag("tile"))
{
return;
}
// If the block has collided, it is also excluded from the collision object
if (AlreadyTouchedList.Contains(col.transform))
{
return;
}
// If the order of collisions is wrong, reward - 1 and end the game
if (col.transform.parent != CurrentlyVisibleTilesList[m_NextExpectedTileIndex].transform)
{
AddReward(-1);
EndEpisode();
}
// Hit the right box
else
{
// Reward + 1
AddReward(1);
// Change the material of the box
var tile = col.gameObject.GetComponentInParent<NumberTile>();
tile.VisitTile();
// Index + 1
m_NextExpectedTileIndex++;
// Add the block to the touched list
AlreadyTouchedList.Add(col.transform);
// If all the tasks are completed, the game is over
if (m_NextExpectedTileIndex == m_NumberOfTilesToSpawn)
{
EndEpisode();
}
}
}
When the agent has no model and people want to record examples manually, the Heuristic method can be used:
public override void Heuristic(in ActionBuffers actionsOut)
{
var discreteActionsOut = actionsOut.DiscreteActions;
//forward
if (Input.GetKey(KeyCode.W))
{
discreteActionsOut[0] = 1;
}
if (Input.GetKey(KeyCode.S))
{
discreteActionsOut[0] = 2;
}
//rotate
if (Input.GetKey(KeyCode.A))
{
discreteActionsOut[2] = 1;
}
if (Input.GetKey(KeyCode.D))
{
discreteActionsOut[2] = 2;
}
//right
if (Input.GetKey(KeyCode.E))
{
discreteActionsOut[1] = 1;
}
if (Input.GetKey(KeyCode.Q))
{
discreteActionsOut[1] = 2;
}
}
Script numbertile. Mounted on the number box cs:
using UnityEngine;
public class NumberTile : MonoBehaviour
{
// The number on the square
public int NumberValue;
// Default material and material for successful conversion
public Material DefaultMaterial;
public Material SuccessMaterial;
// Have you collided
private bool m_Visited;
// Rendering for converting materials
private MeshRenderer m_Renderer;
public bool IsVisited
{
get { return m_Visited; }
}
// Method for converting materials
public void VisitTile()
{
m_Renderer.sharedMaterial = SuccessMaterial;
m_Visited = true;
}
// Method of resetting the box, material restoration, m_Visited status restore
public void ResetTile()
{
if (m_Renderer is null)
{
m_Renderer = GetComponentInChildren<MeshRenderer>();
}
m_Renderer.sharedMaterial = DefaultMaterial;
m_Visited = false;
}
}
configuration file
behaviors:
Sorter:
trainer_type: ppo
hyperparameters:
batch_size: 512
buffer_size: 40960
learning_rate: 0.0003
beta: 0.005
epsilon: 0.2
lambd: 0.95
num_epoch: 3
learning_rate_schedule: constant
network_settings:
normalize: False
hidden_units: 128
num_layers: 2
vis_encode_type: simple
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
keep_checkpoints: 5
max_steps: 5000000
time_horizon: 256
summary_freq: 10000
environment_parameters:
num_tiles:
curriculum:
- name: Lesson0 # The '-' is important as this is a list
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.3
value: 2.0
- name: Lesson1
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.4
value: 4.0
- name: Lesson2
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.45
value: 6.0
- name: Lesson3
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.5
value: 8.0
- name: Lesson4
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.55
value: 10.0
- name: Lesson5
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.6
value: 12.0
- name: Lesson6
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.65
value: 14.0
- name: Lesson7
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.7
value: 16.0
- name: Lesson8
completion_criteria:
measure: progress
behavior: Sorter
signal_smoothing: true
min_lesson_length: 100
threshold: 0.75
value: 18.0
- name: Lesson9
value: 20.0
It can be seen that the configuration file adopts the most commonly used PPO algorithm, and it is an ordinary PPO without other "accessories" such as LSTM, internal reward mechanism and other modules, The only difference is that Curriculum Learning is added here (course study), that is to say, this kind of agent that can sort dozens of blocks is difficult to train at once, so we need to arrange tasks for it from easy to difficult. From the beginning, it can sort two blocks, gradually increase two blocks, and finally reach 20. For a detailed explanation of the parameters of current learning, please see my previous article Ml agents case wall jumping game.
Effect demonstration
Postscript
Compared with the previous case, the innovation of this case is the introduction of Buffer Sensor, which is used to receive the input of different number vectors, rather than hanging in the agent like the previous sensors. This is to deal with the situation that the amount of received information changes with the environment in the case of this case. There are many cases, For example, when an agent faces the enemy, the number of enemies is uncertain, and the number of bullets fired by the enemy is also uncertain. At this time, we need to use buffer sensors to accept different numbers of inputs. Of course, such training often requires more samples, and various numbers of inputs need to be covered, otherwise it will be over fitted. In order to achieve this goal, the previous Curriculum Learning is used to diversify the training samples, make the training from easy to difficult, and make the agent strategy robust.